
Nach langer Zeit konnten wir zum Jahreswechsel 2010/11 wieder einmal ein Weihnachtsprojekt umsetzen. Angeregt durch die Erfahrungen mit dem GAUI 330 XS soll auf der Basis des MultiWii Copters ein „besserer“ Quadrocopter als der GAUI gebaut werden. Ziel ist es, einen preiswerten Quad mit einer stabileren Fluglageregelung zu bauen, der auch noch „schön“ ausschaut.


In den nächsten Tagen und Wochen werden wir hier über die Fortschritte des Projektes „Murkelcopter“ berichten, soweit es uns die Zeit erlaubt.
18.12.2010 Bestellung der Motoren und Regler:
Der Antrieb erfolgt mit 4 kleinen Brushless-Motoren. Geplant waren Hacker A20 mit 1100 U/V. Diese sollten zusammen mit den passenden Reglern urspünglich bei Hoellein bestellt werden, waren dort aber leider nicht lieferbar. Und Hacker selbst macht Weihnachtsferien. Daher sind wir kurzfristig auf eine Direktbestellung bei Hobbyking in Hongkong ausgewichen. Es wurden KDA20-28 Motoren und Turnigy 18A Regler bestellt. Die Lieferung sollte per UPS-Express erfolgen und war tatsächlich nach 4 Tagen bei uns – ganz im Gegensatz zu unserer letzten Hobbyking Bestellung im Frühjahr 2010. Diese war fast 3 Monate unterwegs. Es geht also termingerecht um die halbe Welt – und das trotz winterlichem Schneechaos!
19.12.2010 Bestellung der Elektronik Komponenten
Neben den Motoren und Reglern werden ein ARDUINO Mini Pro Controllerboard und ein Nintendo WII + Controller benötigt. Der Arduino wurde bei Watterott bestellt und war innerhalb von 2 Tagen bei uns. Der Wii Controler wurde bei AMAZON bestellt und war ebenfalls nach einem Tag bei uns.
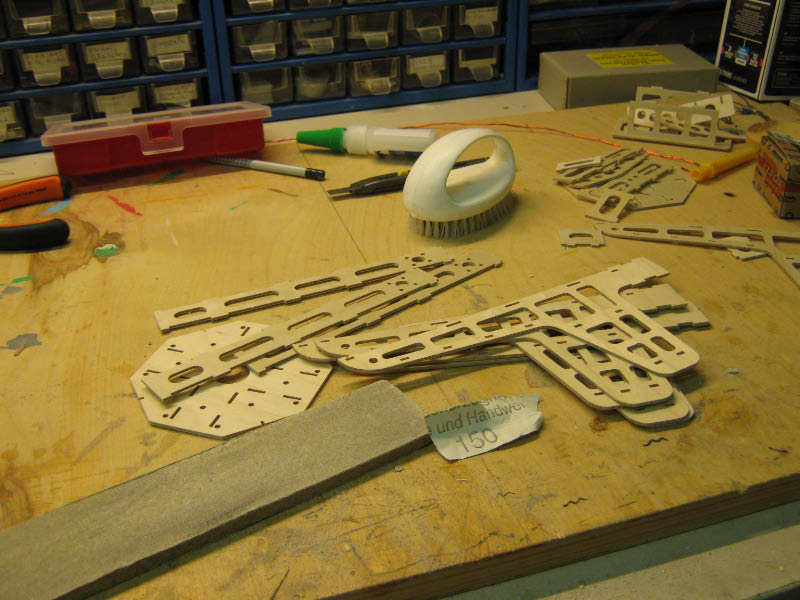
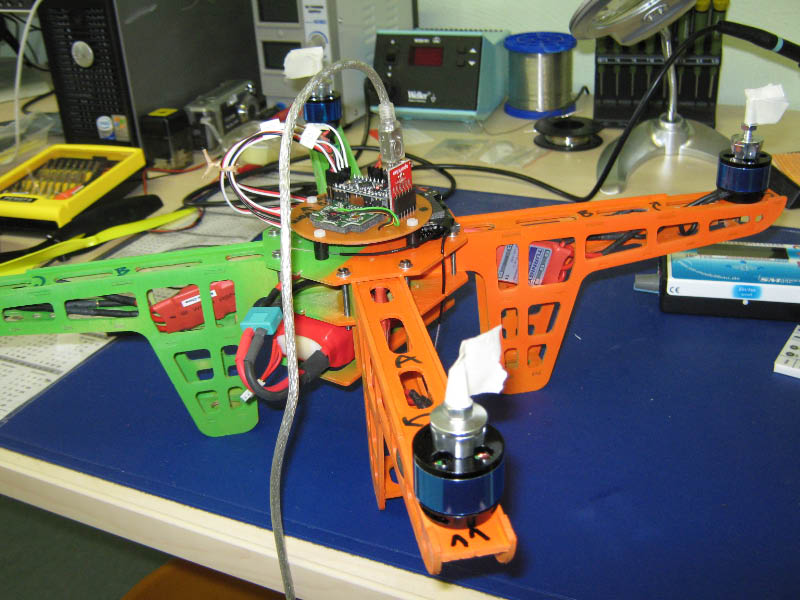
23.12. 2010 – Konstruktion des ersten Rahmens:
Da der Murkelcopter für den Outdoor-Einsatz geplant ist, soll er etwas größer als mein GAUI 330XS werden. Dazu bekommt er einen schönen gefrästen Rahmen. Dieser ist zunächst aus Sperrholz – später nach Abschluß der Erprobung evtl. auch einen aus GfK. Beim GAUI hat zudem das mickrige Fahrwerk nicht überzeugen können. Daher bekommt der Murkelcopter ein paar fest integrierte Landebeine.
Nach drei Abenden war die Version 1 des Rahmens fertig gezeichnet und fertig zum Fräsen. Als CAD Software kam TURBOCAD V16 zum Einsatz.
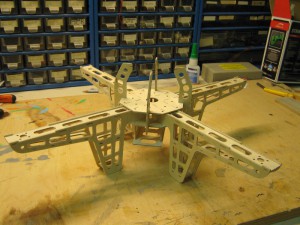
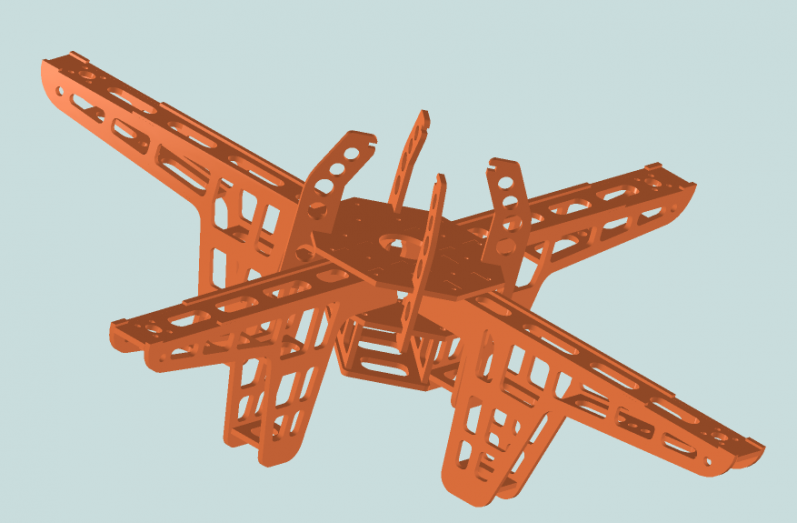
Dieser wurde dann aus 2mm Flugzeugsperrholz gefräst und montiert. Hier das Ergebnis des ersten Entwurfes:

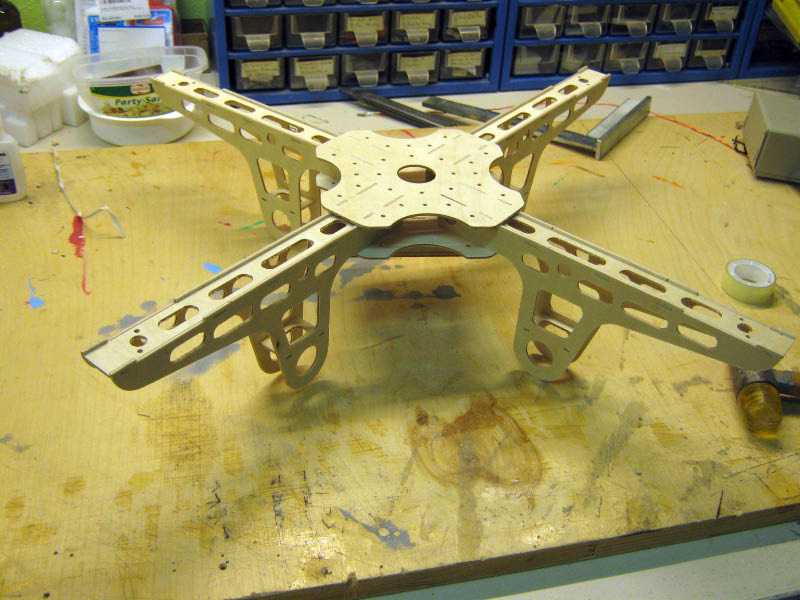
Das Design ist am Material Sperrholz orientiert und sollte auch eine etwas ruppigere Landung überstehen.


Der gesamte Rahmen wiegt nur 148 gr – und das bei einer „Spannweite“ von 50cm.
Um die Festigkeit des Mittelteils bei harten Landungen zu erhöhen, werden Schrauben vorgesehen. Diese verhindern das „Aufplatzen“ der beiden Deckel wenn das Modell härter aufschlägt.


Nach einer ersten Überprüfung sind für Version 2 folgende Verbesserungen am Rahmen des MURKELCOPTER Prototypen vorgesehen:
1. Schrauben ganz an den Holm ran
2. Bohrungen Motor ändern weil die Hongkong-Motren verschiedene Kabelauslässe haben
3. Querspange vorne im Arm einfügen um Verwindungssteifigkeit zu erhöhen
4. Akkufach für 3S vorbereiten, also höher machen
5. Rundes Loch über Landefuß vergrößern
6. Platz im Landefuß für TURNIGY Regler optimieren
Mal sehen wann ich das Redesign schaffe.
Wie der Murkelcopter zu seinem Namen kam…
Tochter kommt in die Bastelbude. Prototyp des ersten Rahmens steht auf dem Tisch.
Tochter: „Was ist denn das für ein murkeliges Ding?“
Vater: „Das ist ein Quadro… äh.. ein Murkelcopter“
Tochter: „Aha“
Und so war der Murkelcopter geboren.
26.12.2010 Baubeginn Elektronik:
Als Lageregelung wird auf die Hard- und Software des MultiWII-Copter Projektes von http://radio-commande.com/international/triwiicopter-design/ zurückgegriffen. Auf der Basis eines Nintendo WII-Contollers und eines ARDUINO-Microcontrollers kann man für ca. 50 EUR eine Lageregelung bauen, die der GAUI-Box (die knapp 200 EUR kostet) überlegen sein soll. Weitere Informationen dazu findet man bei auch im US-Forum RC-Groups in diesem Beitrag.
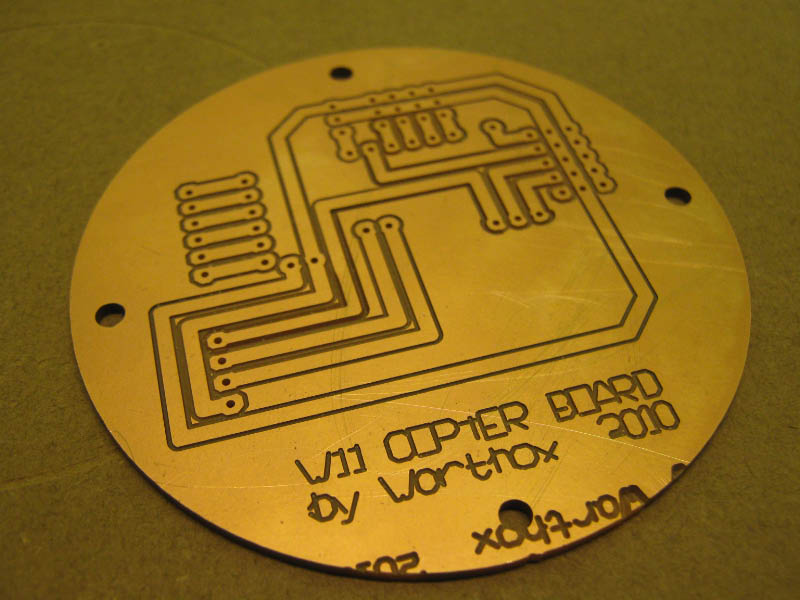
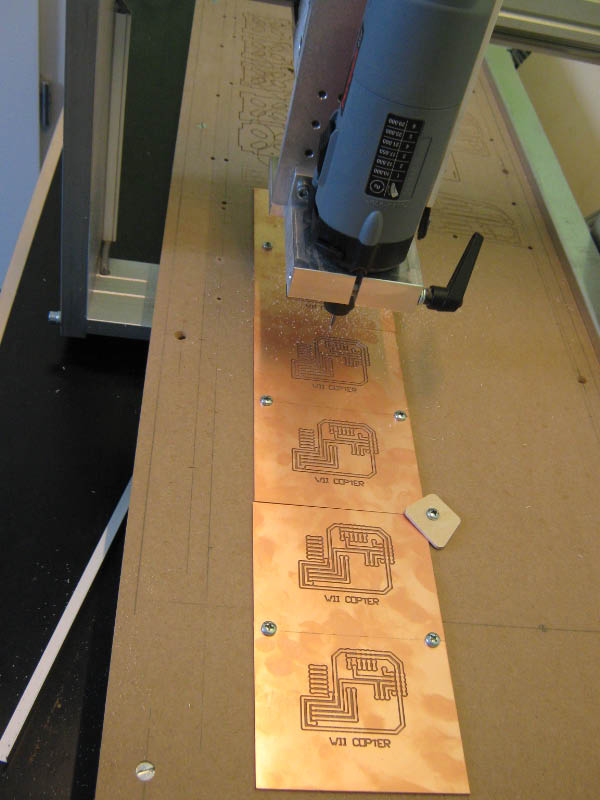
Als Trägersystem benutze ich eine Platine, die von „Warthox“ entworfen wurde und der freundlicherweise die EAGLE-Files zur Verfügung gestellt hat. Daraus habe ich dann eine DXF-Datei zum fräsen erstellt (was aber eine ganze Weile gedauert hat, weil das EAGLE mit einer Unmasse von Fräsparametern arbeitet) und dann diese erste Platine gefräst.
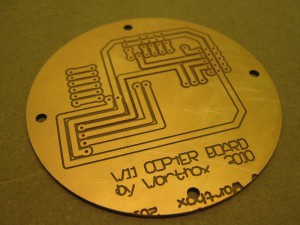
Die DXF-Datei und eine passende G-Code Tabelle stelle ich für alle die eine Fräse haben hier zum Download bereit.
DOWNLOAD WIICOPTERBOARD.ZIPZum Fräsen der Platinen noch folgende Informationen:
Gefräst wird in vier Durchgängen immer mit 15mm/s auf X/Y und Drehzahl 4 auf der Kress
Zuerst Leiterbahnumrisse mit einem 60Grad Gravierstichel, Z=0,15mm,
Dann mit einem 1,0mm Fräser die Löcher bohren, Z=1,8mm
Nun die 3,2mm Löcher fräsen – wieder mit 1,0mm Fräser, Z=1,8mm
Zum Schluß Platinenkontur fräsen auch hier mit 1,0mm Fräser – dabei Stege setzen nicht vergessen, sonst fliegt einem das Ding um die Ohren!
Das verwendete Material ist Hartpapier und hat eine Dicke von rund 1,53mm (mit einseitiger Kupferauflage)
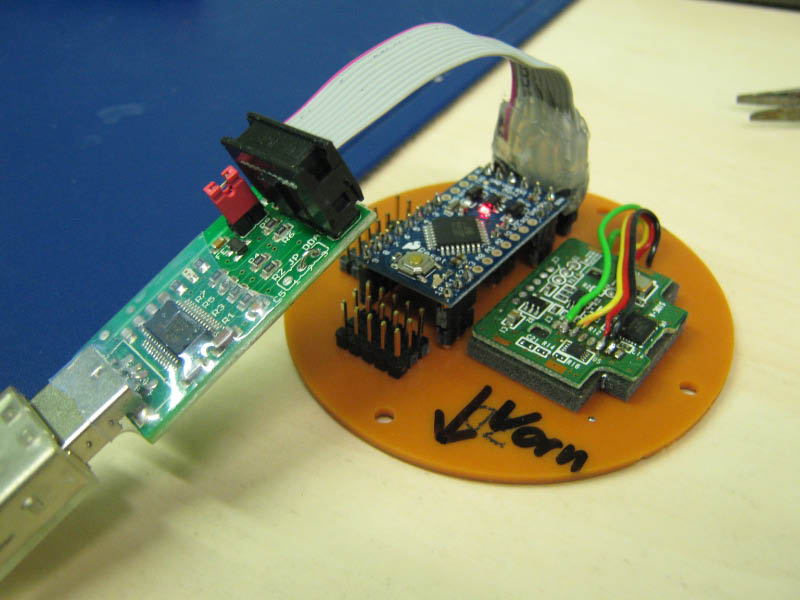
Auf die Platine werden die Steckerleisten gelötet und die Buchsenleisten, falls man das Arduino-Board zum wechseln haben möchte.
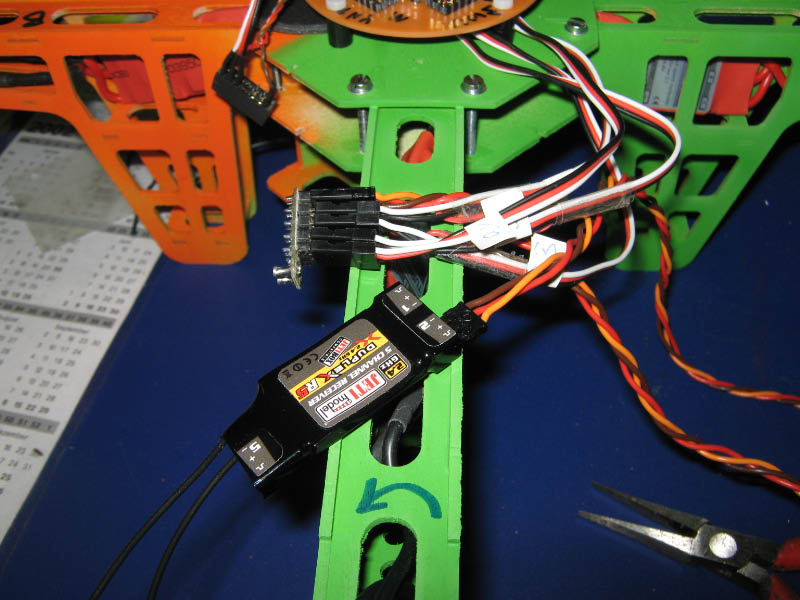
Nachfolgendes Bild zeigt die Anschlußbelegung der Platine:
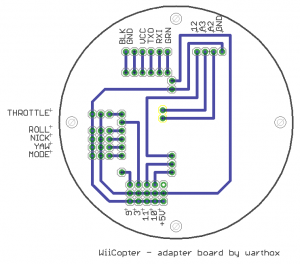

Die Regler werden an die Anschlüße 9,3,11 und 10 angeschlossen. Der Empfänger an die Anschlüße Throttle (gas) Roll (Quer) Nick (Höhe) und Yaw (Seite). Der Anschluß MODE (Kanal 5) ist nur relvant, wenn ein Nunchuck verbaut wird. (siehe unten)
Der 6-polige Anschluß dient zum Programmieren des Arduino über den USB-Seriell Adapter von Sparkfun. Dabei sind die Pins mit BLK und GRN gekennzeichnet. Die Platine wird mit der Bestückungsseite in Richtung Arduino aufgesteckt.
27.12.2010 Bestücken der ersten Platine
Die nachfolgende Bilderstrecke zeigt die Demontage des original Nintendo WII Motion plus Adapter und den Einbau in die Platine.


Lustige Dreieck-Schrauben sollen Bastler abschrecken? Niemals – auch wir haben einen passenden Schraubenzieher 😉

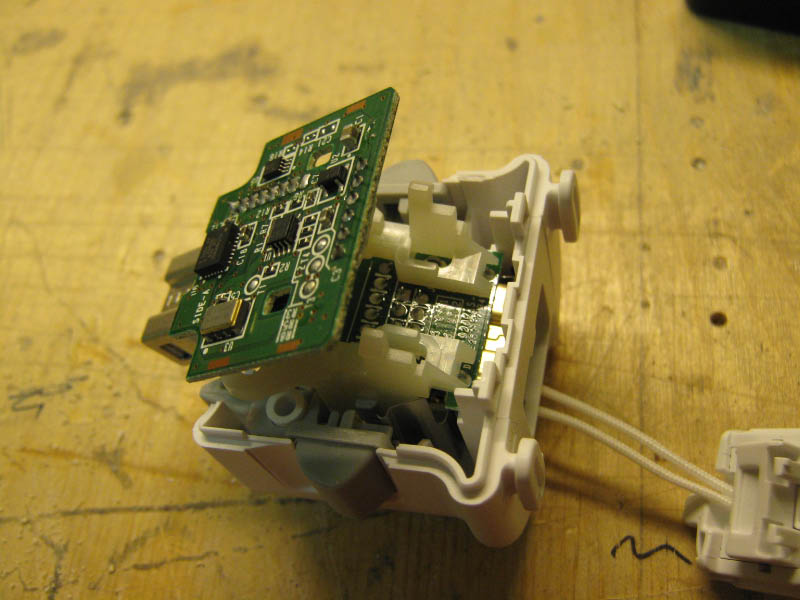

Vorsichtig öffnen und die Platine herausnehmen. Das ganze ist zusammengeklipst. So schaut es dann aus. Das weiße Flachbandkabel abschneiden und die Reste auslöten. An diese Schnittstelle kommt später mal der Nunchuck. Das bunte Kabel mit dem weißen Stecker kann man mit der Flachzange vorsichtig hochbiegen und abbrechen. Dann die Reste auslöten.


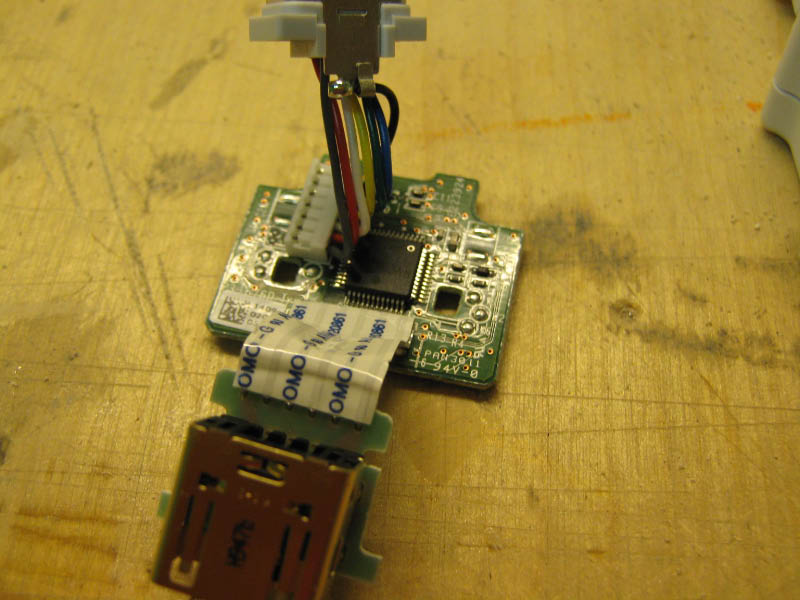
Hier müssen noch die Steckerreste ausgelötet werden. (Heiß machen und mit der Pinzette herausziehen). Anschließend die Kabel nach Plan verlöten. Die Platine wird zur Vibrationshemmung mit einer 3mm Moosgummiplatte von Graupner auf die Platine geklebt.



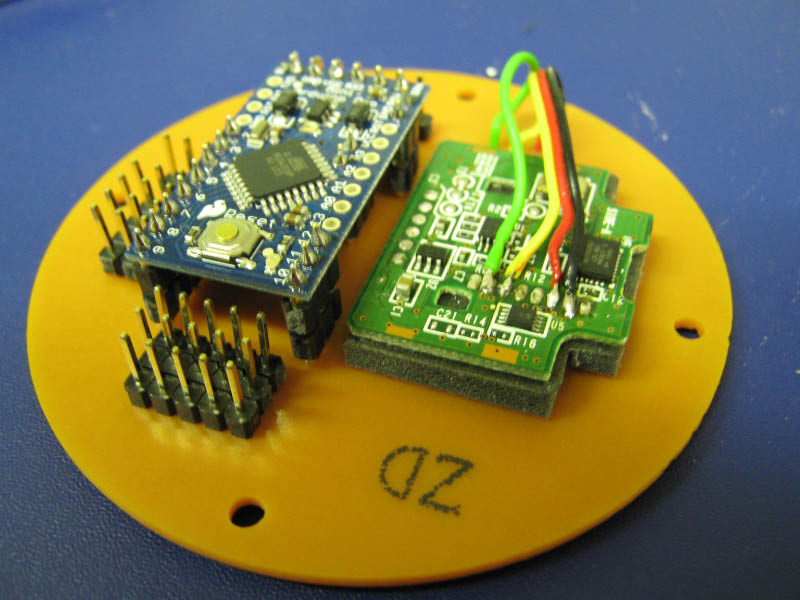
Beim Anlöten der Kabel an der WM+ Platine auf die Lötaugen unmmittelbar an den Kabeln achten! Kurzschlußgefahr! Alles sehr fummelig und nix für Grobmotoriker. Ein feiner Lötkolben mit kleiner Spitze ist unabdingbar. Hier dann die fertige Platine.
WICHTIG: Die Position der WII-PLatine muß wie abgebildet sein! Sonst stimmen später die Achsen der Regelung nicht. Beachte bitte auch das Bild weiter unten, da ist der Richtungspfeil aufgezeichnet.
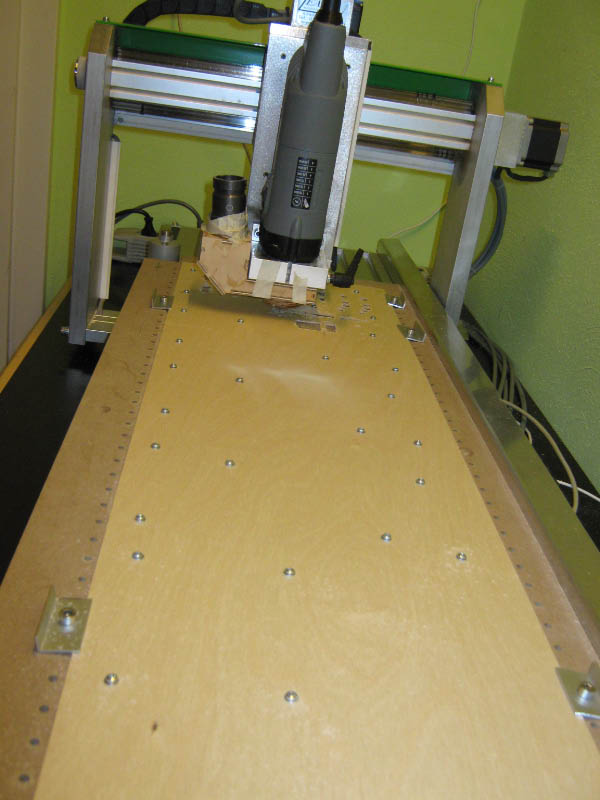
29.12.2010 Noch mehr Platinen
Da sich jetzt etliche „Mitbauer“ bei uns eingefunden haben, wurde erst einmal eine größere Anzahl Platinen gefräst.

Allerdings ist die Staubentwicklung beim Fräsen doch recht heftig, weshalb erst einmal der Bau einer Absaugung vorrangig bearbeitet werden mußte.
30.12.2010 Überarbeitung des Rahmens
Heute wurde der Rahmen nach den obigen Vorgaben überarbeitet. Dabei wurden alle Rahmenteile erheblich ausgedünnt und die Spannweite um ca. 5cm verringert. Auch das Mittelteil wurde verkleinert und mit weniger Bohrungen – dafür aber passend für die Warthox-Platine versehen.


Nachdem das Zeichnen erledigt war, erfolgte der Export als DXF-Datei und anschließend das Überarbeiten der CAM-Daten mit Radius-Korrektur und dem Setzen der Stege. Das geht mit NC-EASY zwar recht flott, ist aber in Anbetracht der Größe der Platte doch recht zeitraubend.
Aus den Erfahrungen beim ersten Fräsen habe ich diesmal die Platte nicht nur an den Rändern aufgespannt sondern auch an neuralgischen Punkten mit Schrauben im Untergrund fixiert. Damit der Fräser da nicht reinrasselt, sind die Bohrungen auf einem extra Layer in den Fräsdaten eingezeichnet und werden erst mal vorgearbeitet. Dann stoppt die Maschine und geht in Parkposition, das Brett wird festgeschraubt und dann kann weitergefräst werden.


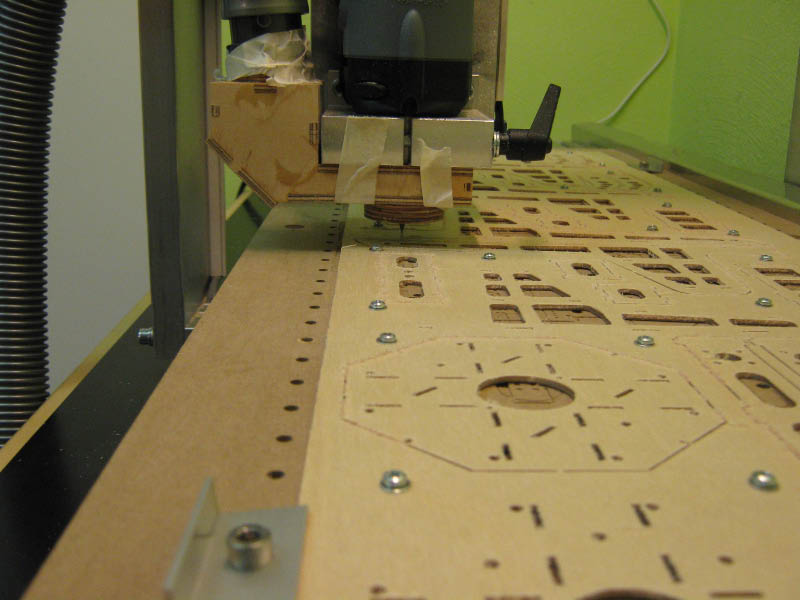
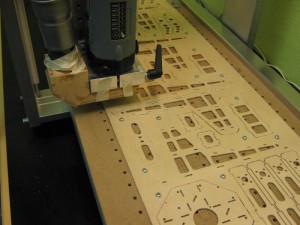
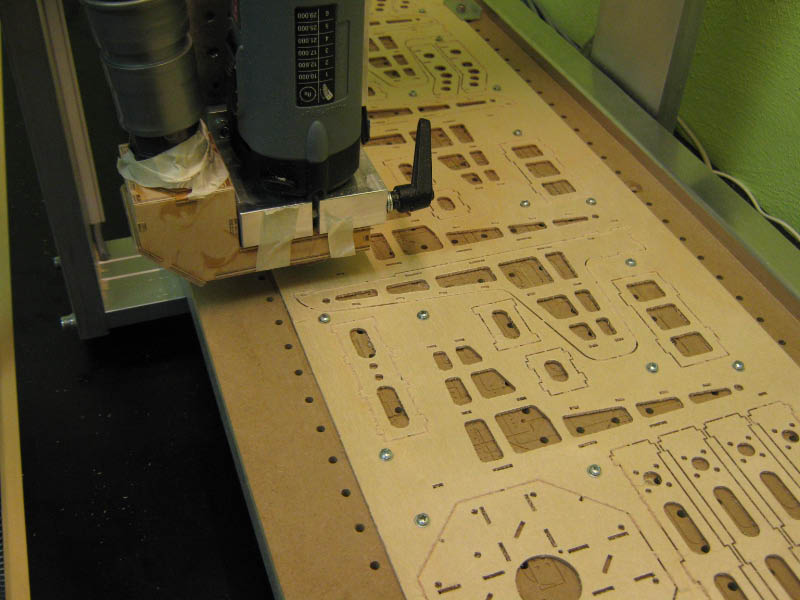
Die neue Absaugung hat sich gut bewährt, kaum Staub und die kleinen Teile der Ausfräsungen wurden auch gleich mit herausgesaugt.
Im Ergebnis sieht es dann so aus:
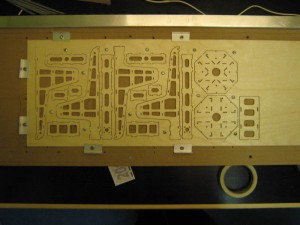

Nach dem Herauslösen der Teile aus der Platte haben diese noch einem kleinen „Pelz“ aus Holzfasern, den man aber mit einer kleinen trockenen Handwaschbürste einfach abbürsten kann.


Die Passgenauigkeit der gefrästen Teile begeistert – und wenn mann die Nasen der Steckungen ein wenig anschleift, kann man die Teile ganz einfach saugend zusammenstecken.


Leider hat sich bei der Überarbeitung ein kleiner Konstruktionsfehler im Bereich des Motorspanntes eingeschlichen, weshalb hier konstruktiv noch ein wenig nachgearbeitet werden muß. Daher hier erst mal Stop nach dem Ausfräsen der Hälfte der Teile.


Also erst mal ein wenig nachsitzen am PC und die kleinen konstruktiven Ungereimtheiten ausbügeln. In Kürze geht es weiter.
31.12.2010 Feinschliff der Konstruktion des Rahmens
Heute wurden die festgestellten Fehler im Motorträger beseitigt und die alle Passungen nochmals überprüft. An einigen neuralgischen Punkten habe ich die Größe der Steckungen um 2/10mm erhöht, um die Teile leichter ineinander stecken zu können.
Danach wurde alles in einer CAM Datei zusammengestellt, um einen kompletten Teilesatz in einem Durchgang fräsen zu können.


Dabei wurde auch die Orientierung einiger Bauteile geändert, um den Faserverlauf der Sperrholzplatte optimal für die Stabilität des Rahmens zu nutzen. Passt jetzt auf ein Brett mit den Abmessungen 250*880mm.
1.1.2011 Großer Frästag
Heute wurde das finale Design zum ersten Mal gefräst und der zur Kontrolle auch der erste Rahmen komplett montiert.


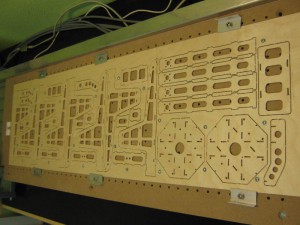

Ganz schön große Platte – ein kompletter Fräsdurchgang dauert knapp 75 Minuten! Dazu kommen dann noch ca. 10 Minuten Rüstzeit.

Die gefrästen Teile wurden dann aus der Platte an den Stegen mit einem Teppichmesser herausgeschnitten, abgebürstet und verschliffen. Alle Stege sind so platziert, da keine Steckungen oder Montageflächen, bei denen zwei Teile aufeinanderstoßen, davon betroffen sind. So ist immer eine optimale Passung garantiert.
Hier der fertige Rahmen und ein paar Detailaufnahmen.
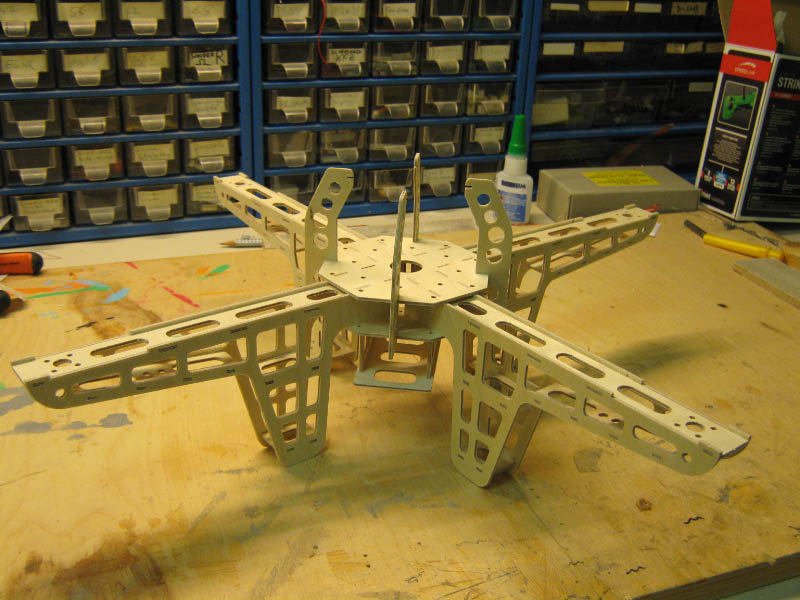
Das Gewicht beträgt jetzt nur noch 138g und es ist durch die Kastenkonstruktion alles erheblich stabiler als bei der ersten Version. Optional wurden noch seitliche Halter für eine Kameraplattform vorgesehen,



Der Motorträge ist jetzt zudem 4fach gelocht, da die verschiedenen Hong-Kong Motoren ihre Kabelauslässe an verschiedenen Stellen haben. Die Landestützen sinde ebenfalls versteift und hier kann dann ein EPP-Klotz als „Landepuffer“ eingesetzt werden.
Morgen bekommen die Mitbauer ihre Frästeile und dann geht es weiter mit den Motoren und der Elektronik.
2.1.2011 Framebuilding-Day
Heute war Rahmenbautag. Die gestern gefrästen Teile wurde aus den Platten geschnitten und verputzt. Das ging alles relativ schnell, auch weil viele helfende Hände zugegen waren.




So schaut ein kompletter Teilesatz aus. Das zusammenstecken und verkleben mit dünnflüssigem Sekundenkleber dauert bei gemütlichem Tempo so ca. 30 Minuten. Wie wir feststellen konnten, gibt es zwischen den einzelnen Frames doch Gewichtsunterschiede. Der leichteste Frame war bei 127g der schwerste bei 142g – obwohl alle aus 2mm Birkensperrholz gefräst sind das auch aus der gleichen Quelle (Fa. Zembrod) stammt.
Dann wurde der Prototyp mal ein wenig lackiert – mit Duplicolor aus der Dose. Natürlich in den Farben des Sponsors

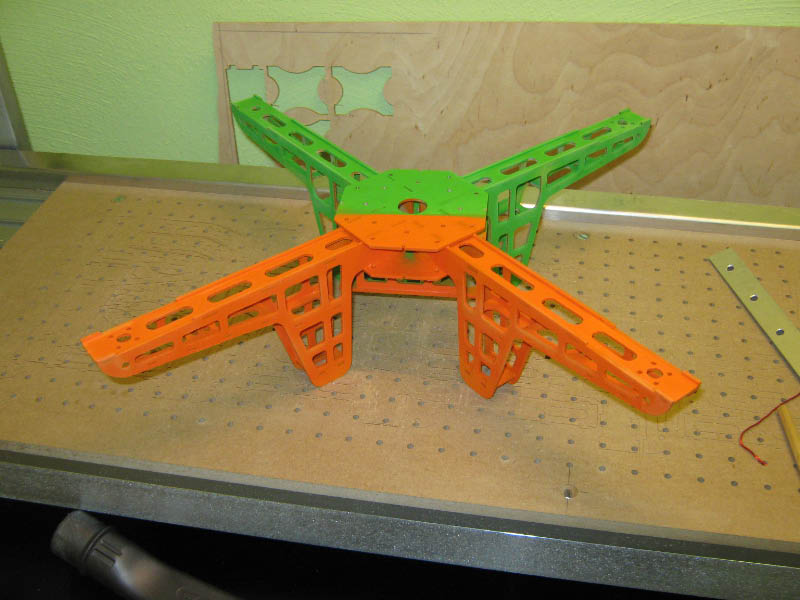
Im Anschluß begann die Vorbereitung der Motoren und Regler zum Einbau. ALs Motoren kommen die KDA20-28 von Hobbyking zum Einsatz. Diese Motoren sind den Hacker-Motoren zum verwechseln ähnlich. Ob die Qualität auch so gut ist? Wir wissen es im Moment nicht, aber wir werden sehen.
Allerdings sind die Motorenkabel nicht verzinnt und auch die beiligenden 3,5mm Stecker scheinen völlig überdimensioniert. Daher wurden erst mal 2mm Goldstecker aus dem Slowflyer-Fundus (Bezug bei Fa. Nessel) verlötet. Die sind erheblich schlanker und reichen hier völlig aus.




Die Löterei hat sich dann bei der Menge an Motoren und Regler doch etwas in dei Länge gezogen. Aber schließlich war es vollbracht.




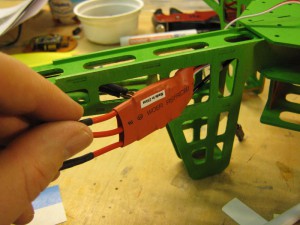
Und ein Regler durfte auch schon mal im Frame „probewohnen“. Passt wunderbar – der Regler bekommt Luft und es hängen vor allem keine Kabel herum.
3.1.2011 Einspielen der WiiCopter Firmware
Heute wurde der Arduino auf der Platine mit der Firmware geladen. Dazu muß zunächst die Arduino Entwicklungsumgebung von der offiziellen Arduino-Webseite heruntergladen und auf dem PC installiert werden.
Dann wird ein passender USB-Adapter benötigt, um die Verbindung zwischen PC und Microcontroller herzustellen. Dazu wird das FTDI-USB-Board von Sparkfun benötigt, das mir aber nicht zur Verfügung stand. Daher mußte eine Alternative gefunden werden.
Da das Arduino-Board einfach über eine serielle Schnittstelle programmiert wird, sollte eigentlich ein beliebiger FTDI-Wandler benutzt werden können. Ich habe daher auf das FRANZIS Lernpaket USB-Experimente zurückgegriffen und die darin enthaltene Platine benutzt. Also flugs ein Adapterkabel gelötet, bei dem VCC, GND, RXD und TXD verbunden sind. Aber leider passiert nix, es ist nicht möglich ein Programm auf den Arduino zu laden.
Nach einem Vergleich der Schaltpläne und einer längeren Recherche auf den verschiedenen Arduino-Seiten wurde dann festgestellt, dass ein Arduino auch ein Reset-Signal auf der DTR-Leitung benötigt. Also auch noch ein fünftes Kabel angelötet und schon funktioniert es! Nun konnte ein passendes Adapterkabel mit DIL-Stecker und Buchsenleiste gebaut werden.

Als nächstes folgt die Programmierung des Microcontrollers. Die Software ist von AlexinParis der diese auf seinen Seiten zum Downlaod anbietet. Dies wird dann in die ARDUINO Entwicklungsumgebung geladen. Um diese auf den Arduino überspielem zu können, muß man zunächst die gewünschte Konfiguration im Porgrammcode aktivieren, im dem man die Auskommentierung entfernt. Dazu in der Sektion /****CONFIGURABLE PARAMETERS****/ die erforderlichen Einträge machen wie z.B. welche Konfiguration des Coptes man fliegen will, die Drehrichtung von YAW usw. Dann den Code compilieren und übertragen. Details wie man das macht, findet man im nachfolgenden Video.
Alle Details zum verwendeten SDK findet man auf den ARDUINO-Seiten.
Ein weiteres Video ist das folgende Programming the Arduino – T-Wii Copter auf Vimeo.
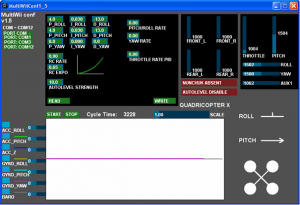
Nachdem die Software auf dem Arduino war, wurde die Multii-Wii Konfigurationsappliktion installiert und dann mit „START“ die Datenübertragung gestartet. Es zeigt sich dann folgendes Bild:
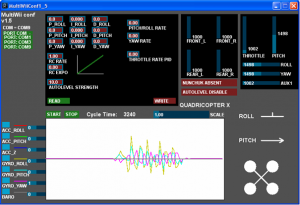
Wenn man die Platine bewegt werden die Steuersignale sichtbar. Damit ist alles bereit – die Entmontage des Murkelcopters kann beginnen. Auch wenn das ganze heute deutlich länger als gedacht gedauert hat.
4.1.2011 Endmontage des Murkelcopters
Heute begann die Endmontage des Prototypen des Murkelcopters. Es wurden die Motoren montiert und die Regler installiert. Die Verbindung zwischen Motor und Regler sollte dabei unbedingt steckbar ausgeführt werden. Dies zum einen damit man problemlos die Drehrichtung der Motoren ändern kann, zum anderen damit im Falle eines Falles der Motor davonfliegen kann, ohne den Regler zu zerstören.


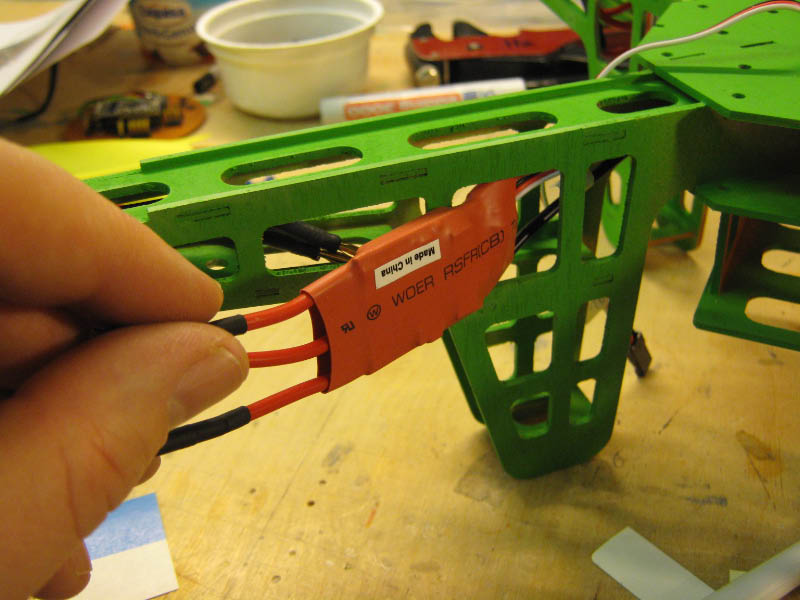
Dabei ist aufgefallen, dass die hintere Schraube des Motors nicht mehr erreichbar ist – die untere Aussteifung ist im Weg. Ich habe dann ein Loch gebohrt, um die Schraube festziehen zu können, aber das wird noch im Plan geändert. Die Regler lassen sich problemlos von vorne seitlich in den Rahmen stecken, die Kabel führt man zur Mitte. Unbedingt die Anschlußkabel der Regler beschriften, das macht sich später beim Anschluß der Platine bezahlt.
Dann werden Motoren und Regler miteinander über die Stecker verbunden. (Die 2mm Goldkontaktstecker würde ich nicht mehr verwenden – diese sind recht lang und daher ist es ein ziemliches Gefummel die Kabel zu verbinden. Dann doch lieber die dicken, aber kurzen 3,5mm Stecker nehmen)
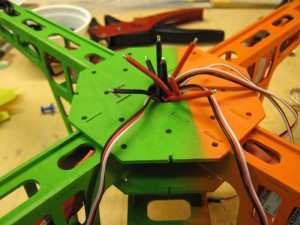


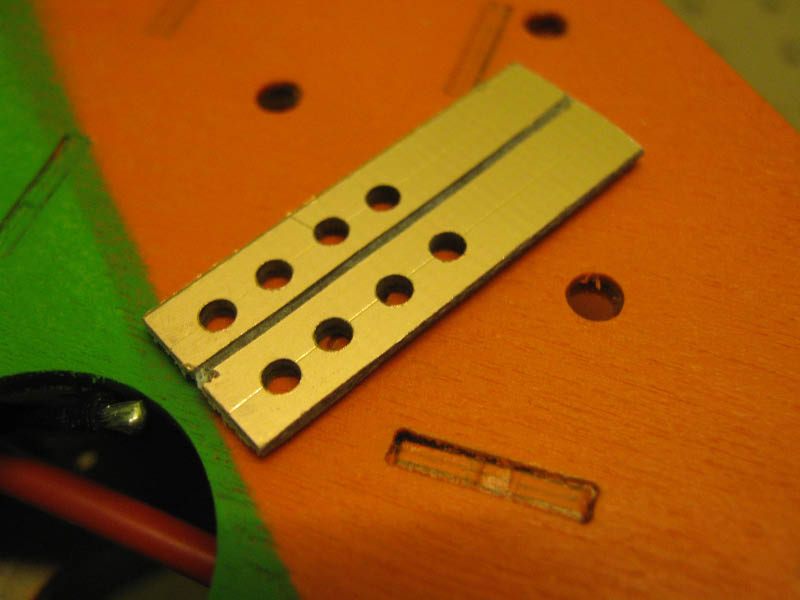

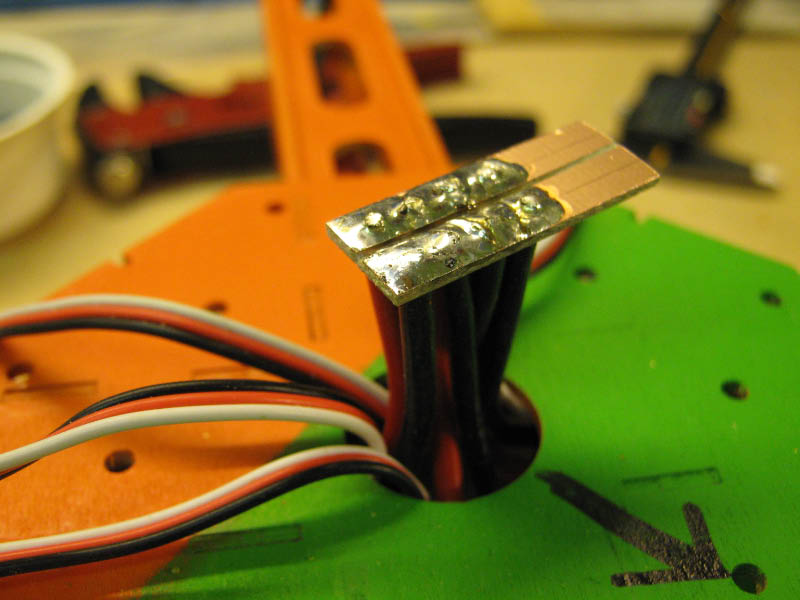
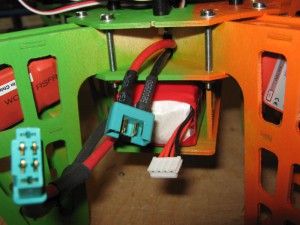
Die Kabel der Regler werden paarweise aus dem Loch geführt, auf einem Streifen Platinenmaterial zusammengefasst und verlötet. Anschließend steckt man das Ganze durch das Loch in die Mitte des Rahmens zurück.

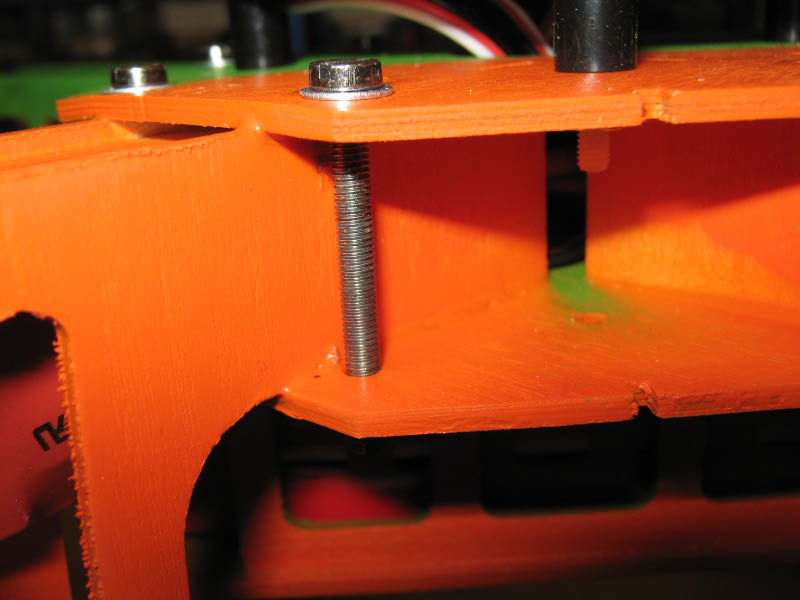


Mit 30mm M3 Schrauben werden die beiden Hauptplatten des Rahmens noch miteinander verschraubt. Ob das wirklich nötig ist, weiß ich nicht, aber die entsprechenden Bohrungen sind auf jeden Fall vorhanden.
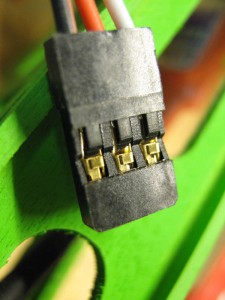

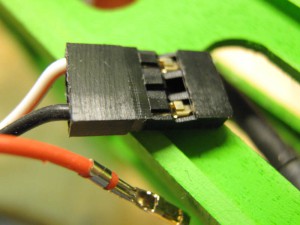
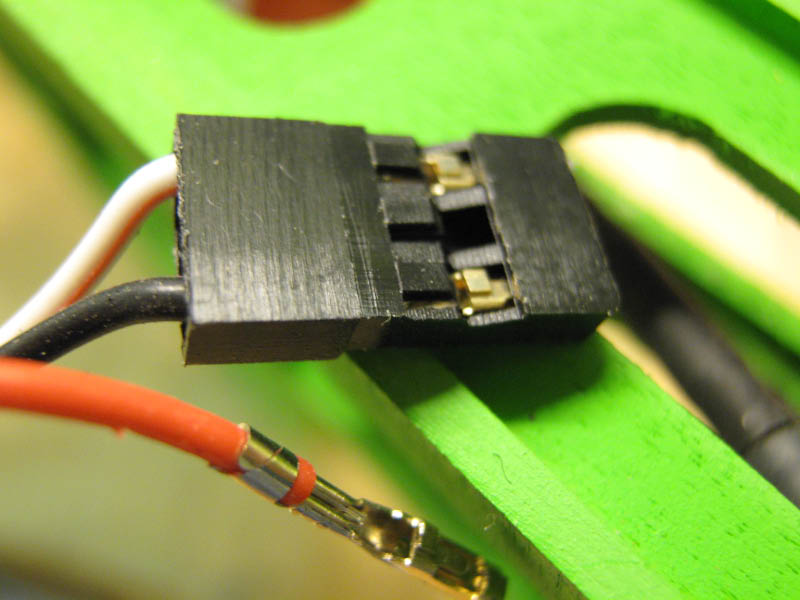
Vor dem Anschließen der Regler an die Hauptplatine sollte man bei drei von den vier Reglern das BEC abklemmen, damit es hier zu keinen Überraschungen durch BEC-Kurzschluß kommt, Dazu einfach den mittleren Draht aus dem Stecker ziehen, nachdem man mit einer Nadel die kleine Kunststoffnase am Stecker ein wenig angehoben hat. So ist dieser Vorgang reversibel und kann jederzeit rückgängig gemacht werden.
Abschließend wird die Platine montiert und verkabelt. Ein erster kurzer Test läßt alle LEDs aufleuchten und die Motoren kalibrieren sich.


Der Anschluß des Empfängers erfolgt über einen Adapterstecker. Dabei ist ein Kanal voll belegt, also mit Signal, Plus und Masse, Bei den anderen Kanälen ist nur der Signalanschluß herausgeführt. Das reicht, denn die Stromversorgung des Empfängers erfolgt ja über die Platine.

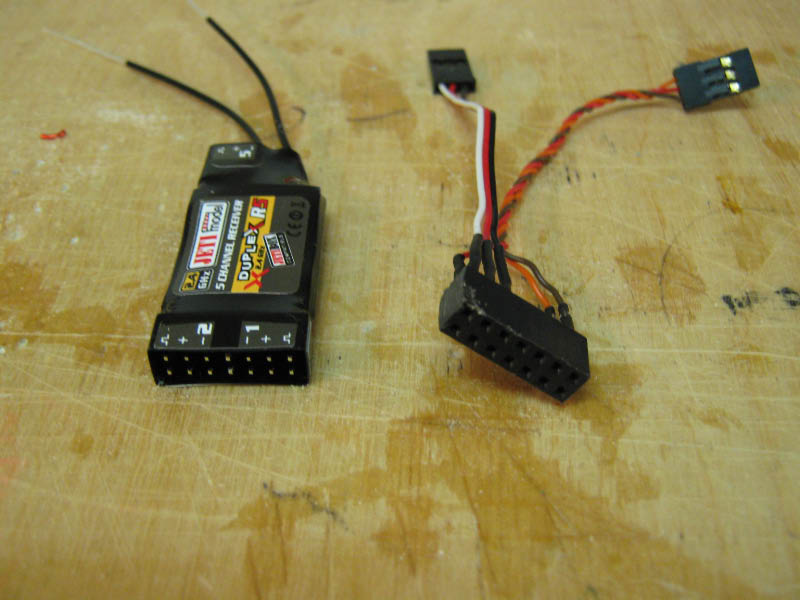


So bleibt die Verkabelung übersichtlich und ein übermäßiges Gewurschtel wird vermieden.
Damit bin ich für heute erst mal fertig. Als nächstes folgt dann die Senderprogrammierung und dann hoffentlich bald erste Testflüge.
5.1.2011 Finale Fassung der Pläne & Fräsdaten 
Hier folgt nun die finale Fassung der Pläne des Murkelcopter-Frame. Diese Version wurde nochmals in Details verbessert, die sich nach dem Montieren des Prototypen des Murkelcopters ergeben haben. So wurde z.B. die Zugänglichkeit der Motorbefestigung verbessert, die Grundplatte des Akkuhalters etwas verkleinert und der Durchmesser der Zentralbohrung der Grundplatte vergrößert. Damit wird die Montage der Komponeten nochmals erleichtert.
Zum Plan: Der Plan ist in 3 Layer unterteilt. Ein Layer für die Befestigungslöcher, ein Layer für Innenkonturen und ein Layer für Außenkonturen. Er enthält alle Bauteile und so kann ein komplettes Murkelcopter-Frame in einem Durchgang gefräst werden (wenn die Platte auf die Fräse passt).
Die Faserrichtung der Sperrholzplatte sollte in Längsrichtung verlaufen, damit die maximale Stabilität des Rahmens erreicht wird. Als Material wurde 2mm Flugzeugsperrholz Birke verwendet. Auf dieses Material hin sind auch die Passungen und Steckungen im Plan ausgelegt.
Das ZIP Archiv enthält die DXF-Datei, die Fräsdaten als G-Code und auch eine PLT-Datei, falls jemand Probleme mit dem Konvertieren der DXF-Daten hat. Ich empfehle aber, wenn immer möglich die DXF Daten als Grundlage für das Fräsen zu benutzen.
Bis zu diesem Zeitpunkt habe ich für die Erstellung und Optimierung des Planes für das Murkelcopterframe rund 32 Stunden Zeit investiert. Gezeichnet wurde mit mit TurboCAD 16 pro. Dazu kommen noch etliche Stunden für diverses „Testfräsen“.
Ich würde mich freuen, wenn es ein paar Bilder von der Murkelcoptern der „Nachfräser“ gibt.
Weitere Bilder vom Zusammenbau des Rahmens und was dabei zu beachten ist gibt es weiter unten (siehe Eintrag vom 13.2.2011)
6.1.2011 Konfiguration der Systemkomponenten und Erstflug
Heute wurden die Systemkomponenten abschließend konfiguriert und dann konnte der Erstflug erfolgen.
Schritt 1: Konfiguration der Regler
Zuerst prüfen wir die die Einstellungen der Regler. Da wir hier die TURNIGY Regler im Einsatz haben, können wir dazu eine Programmierkarte benutzen, was das ganze erheblich vereinfacht. Damit machen wir dann folgende Einstellungen für jeden Regler:
- Brake off – also Bremse aus
- Akku Typ Lipo
- Cut-Off: Soft Cut (oder wenn möglich sogar No-Cut)
- Cut-Off Voltage: Low – damit haben wir die maximale Sicherheit gegen vorzeitige Abschaltung
- Startmode: Normal – kein Softstart
- Timing High – da wir ja Außenläufer einsetzen
- Governor Mode: Off – kein Heli-Modus, keine Drehzahlregelung!
Mit der Programmierkarte sieht das so aus:


ACHTUNG: Die Programmierkarte von Turnigy funktioniert nur, wenn KEINE Motoren an den Regler angeschlossen sind. Also erst die Regler programmieren, dann die Motoren anstecken.
Schritt 2: Drehrichtung der Motoren prüfen
Achtung: Nachfolgende Angaben gelten für X-Konfiguration, andere Modi bitte in der Doku von Alex nachschauen.
Motor 3, 9: im Uhrzeigersinn – hier werden später die GAUI B-Propeller montiert
Motor 10,11: gegen Uhrzeigersinn – hier werden später die GAUI A-Propeller montiert
Dazu einen kleinen Klebestreifen an die Motoren machen und Drehrichtung prüfen
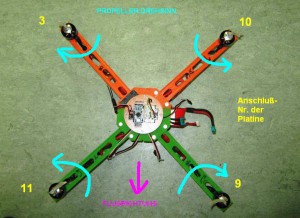

WICHTIG: Dann unbedingt nochmal prüfen, ob die Regler wie auf dem Bild angezeigt an der Platine angeschlossen sind! Wenn die Anschlüsse nicht stimmen, fliegt der Copter nicht sonder dreht beim Gasgeben sofort weg und ist nicht mehr zu kontrollieren.
Schritt 3: Programmieren des Senders
Nun folgt das Programmieren des Senders. Dabei legt man am besten die einzelnen Steuerfunktionen auf die Kanäle 1 bis 4 und schreibt sich eine Liste, welche Funktion wo zugewiesen ist, denn leider ist die Benennung der Steuerfunktionen im MultiWii Copter Projekt ein wenig wirr.
| Sender | MultiWii Software | Platine Warthox |
| Quer/Aileron | Roll | Roll |
| Höhe/Elevator | Pitch | Nick |
| Gas/Throttle | Throttle | Thro |
| Seite/Ruder | Yaw | Yaw |
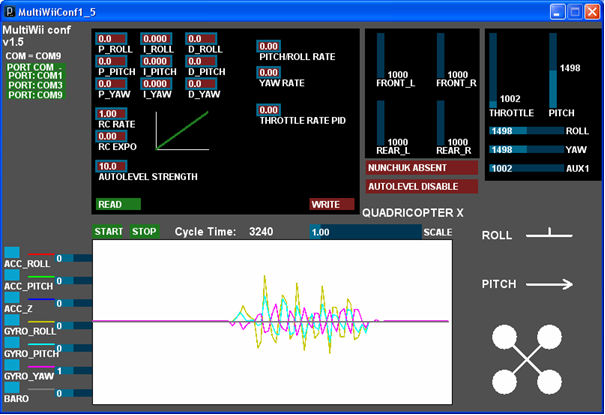
Jetzt die MultiWii-Conf Konfigurationssoftware auf dem PC starten und die Verbindung zum Multicopter herstellen.

In dieser Software kann man nun die Servowege für die vier Steuerfunktionen am rechten oberen Bereich sehen. Dies für jeden Kanal auf dem Sender über die Servowege so einstellen, dass die Pulsdauer bei Minimum 1000 und bei Maximum 2000 beträgt, der Mittelwert muß bei 1500 liegen.

Anmerkung: Wenn man die PID Werte hier ändern will, dann den betreffenden Wert anklicken und dann die Maus bewegen – Wert ändert sich dann. (Beachten Sie dazu auch das Video am Ende des Artikels)
Schritt 4: Einlernen der Senderwege für die Regler
Damit die Regler auch alle gleichmäßig anlaufen, empfiehlt es sich, zum Abschluß noch den Senderweg für die Motorsteuerung allen Reglern einzulernen. Dazu muß die Regler einzeln direkt an den Empfänger anschließen, den Gasknüppel am Sender auf Vollgas, dann Akku anstecken. Es ertönen zwei Pieptöne, dann sofort Gasknüppel auf Aus. Es ertönen wieder einige Pieptöne und zum Schluß ein langer Piepton. Jetzt ist der Regler programmiert. Dieses Prozedere kann man reihum einzeln für alle vier Regler wiederholen.
Man kann aber das ganze auch vereinfachen, indem man mit einem geeigneten Adapter die Anschlüsse aller Regler zusammenfasst und so alle vier Regler auf einmal programmiert.
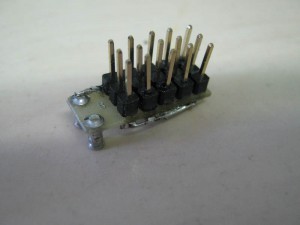
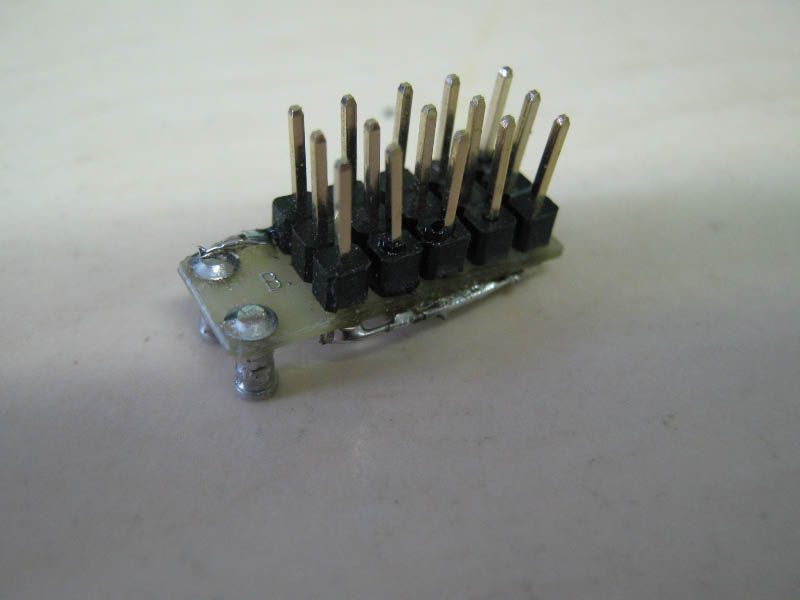

Auf dem Adapter sind einfach alle 5 Steckkontakte parallel miteinander verbunden.MIt den Kontakten 1 bis 4 werden die Regler angeschlossen, an Kontakt 5 über ein Kabel der Gas-Anschluß des Empfängers.
Schritt5: Abschließender Funktionstest (ohne Propeller!)
Jetzt verkabeln wir das ganze Modell wieder. Dann wird der Akku angeschlossen und dann der USB Adapter an die Platine angeschlossen. Die MultiWii Conf Software starten. COM Schnittstelle auswählen, dann START der Übertragung. Wenn man den Copter bewegt, sollte sich ein Ausschlag auf der Linie zeigen. Wenn man ihn wieder ruhig abstellt, muß die Linie wieder ein Strich sein.
Jetzt die nochmals Senderimpulslänge prüfen (rechts oben). Dazu die Knüppel bewegen und die Werte rechts oben beobachten. Diese müssen zwischen 1000 (minimum) und 2000 (maximum) liegen. Eine Abweichung von 3-6 beim Hin- und Herbewegen ist normal, das ist die Toleranz der Knüppelaggregate.
Schritt6: Fertigmachen zum Erstflug
Es werden die Propeller montiert. Wir verwenden hier die 8 Zoll Propeller von GAUI. Hier bekommt man das komplette Set mit 2 rechts- und 2 linksdrehenden Props für weniger als 12 EUR.
Dann wird der Murkelcoper in der Hand gehalten und mit YAW rechts bei Gasknüppel in Nullstellung die Motoren aktiviert. Dies ist ein Sicherheitsfeature, über das man streiten kann, aber so ist es eben. Dann mal probeweise Gas geben und die Steuerfunktionen prüfen, während man den Copter von unten in der Hand hält. YAW dreht den Copter, PITCH (das hier eigentlich NICK heissen müßte) kippt den Copter nach vorn und hinten, ROLL kippt den Copter zur Seite.
Dabei stellten wir fest, dass die im Quellcode vorgebene Leerlaufdrehzahl von 1300 für Turnigy-Regler viel zu hoch ist. Daher wurde der Wert für MINTHROTTLE auf 1200 reduziert, das Programm neu kompiliert und wieder auf den Arduino übertragen. Das passte dann besser.


Der Murkelcopter ist damit bereit zum Erstflug.
Hier habe ich bei YouTube noch folgendes Informationsvideo von Florian Beubl gefunden. Es zeigt sehr schön, wie das Konfigurieren des MultiWii Copters geht.
6.1.2011 Erstflug
Der Erstflug fand aufgrund von Dauerregen in der leeren Garage statt.
Das Modell war am Anfang praktisch gar nicht in die Luft zu bekommen, bis wir dann beim Lesen des „Kleingedruckten“ auf der Webseite von Alex den Punkt „Kalibrieren der Sensoren“ fanden. Man sollte also nach dem Anstecken des Akkus erst einmal die Sensoren kalibriren. Dies erfolgt, in dem man bei Gasknüppel unten den Knüppel für YAW nach Links und NICK nach unten bewegt. Am Copter beginnt dann die grüne LED zu blinken und erlischt, wenn die Kalibrierung beendet ist.
7.1.2011 Weitergehende Flugerprobung
Heute wurde im Rahmen des Möglichen (leider nur Garage wegen Dauerregen) noch ein wenig das Flugverhalten des Murkelcopters optimiert. Dies geschieht über das Einstellen der verschiedenen Regelparameter mit der MultiWii-Conf Konfigurationssoftware auf dem PC.
Das ganze wird aber schnell zu einer üblen Rennerei, weshalb nach Abhilfe gesucht wurde. Man hat ja die Möglichkeit, ein serielles LCD an den Copter anzuschließen, und dann über den Sender die Parameter zu verändern. Das ist aber nicht so ganz mein Geschmack, und auch das serielle LCD ist wieder so ein „Spezialbauteil“ was man erst bestellen muß. Im Forum von http://www.rc-heli-fan.org/ fand ich dann eine elegantere Lösung: Eine auf dem Arduino basierende MultiWii-Konfigurationsbox. Dieses Teil wurde dann gleich ml gebaut. Näheres dazu in im seperaten Beitrag „MultiWii Copter – Konfigurationsbox“
8.1.2011 Flugerprobung im Freien und Einbau des Nunchuk
Das Wetter ließ heute einige erste Flüge im Freien zu. Allerdings war es sehr windig und dann mußte das ganze wegen plötzlichem Starkregen auch noch vorzeitig abgebrochen werden. Die Konfigurationsbox hat sich auf jeden Fall schon mal bewährt.
Die wichtigesten Erkenntnisse: Das Reduzieren der PID Werte macht den Murkekopter erheblich einfacher zu kontrollieren. Ich fliege jetzt mit folgenden Werten:


Auch das Reduzieren des Parameters „RC Rate“ hat die Steuerung erheblich vereinfacht. Für Einsteiger in das Thema „Quadrocopter“ empfehle ich daher bis auf weiteres die oben genannten Einstellungen. Zudem ist das Modell mit 2S wesentlich zahmer zu fliegen als mit 3S, also ist auch das eine Überlegung wert.
Bei dem plötzlichen Regenschauer wurde auch die gesamte Elektronik nass. Daher habe ich beschlossen diese mit einem Gehäuse zu versehen. Ein Besuch im örtlichen Haushaltswaren-Fachhandel hat mich dann zur Klickbox Apfel von Fa. Buchsteiner geführt. Kostet 2,95 EUR und passt auf den Rahmen des Murkelcopters wie angegossen. Der Innendurchmesser mit 55mm passt perfekt für die Warthox-Platine. Diese Box kann man übrigens auch ONLINE kaufen.


Und weil jetzt eh die ganze Elektronik abgebaut war, wurde jetzt auch gleich der Nunchuk nachgerüstet. Der ist zwar zum fliegen nicht zwingend nötig, aber das Autoleveling interessiert mich. Also wurde mal gleich ein Nintendo Teil zerlegt.




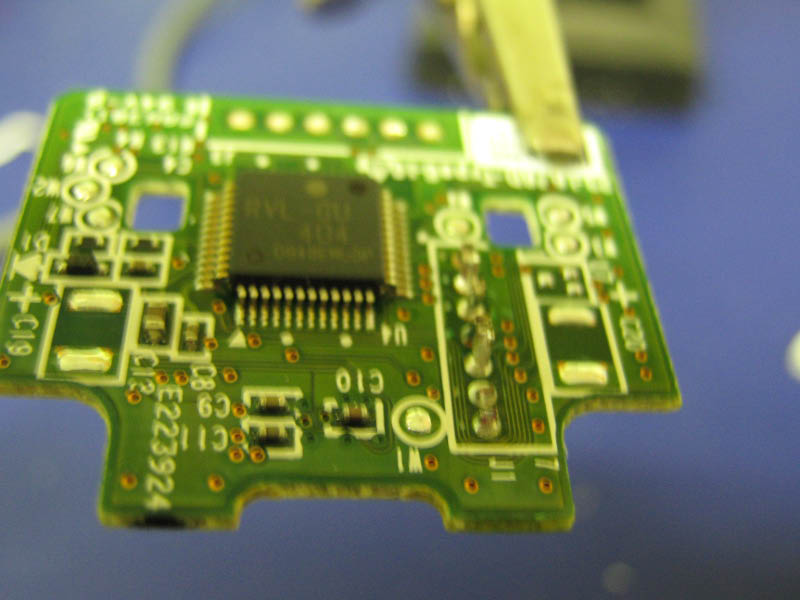
Nach dem Ablöten der Taster und des Potis liegt dann die nackte Platine vor:



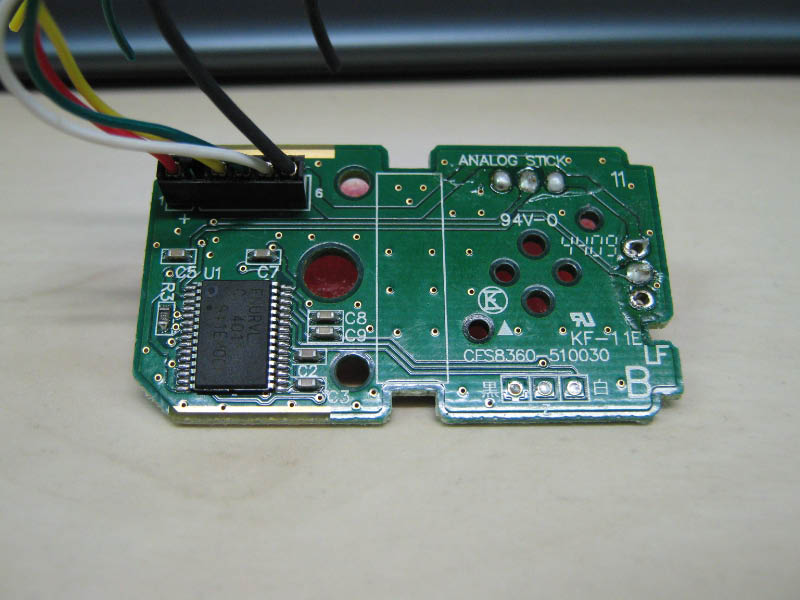
Bei der originalen Nintendo Nunchuk Platine kann man dann Platz sparen, indem man den Teil auf dem der Poti war, absägt. Bei einigen „kompatiblen“ Nunchucks kann es aber passieren, dass danach die Platine nicht mehr funktioniert. Also im Zweifelsfalle lieber drann lassen.
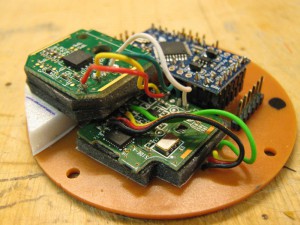
Bein Einbau des Nunchuck ist unbedingt auf die richtige Orientierung zu achten, ebenso dass dieser richtig nach Plan verkabelt wird. Die Platine wird im rechten Winkel zur WM+ Platine angeordnet, die Bauteileseite auf der der Joystick war, muß nach oben zeigen!
Mit ein bischen Geduld und doppelseitigen Schaumklebeband kann man die Nunchuk Platine dann noch mit auf den WiiCopter-Platine packen.
{kind=link}



Vor dem Einbau wurde nochmal alles am PC auf Funktion getestet.


Dabei wurde der Empfänger angeschlossen und dann das ganze mal von Hand durchprobiert. Die Stromversorgung kann dabei aus dem USB-Kabel erfolgen, es muß allerdings für den Empfänger vorübergehend noch eine Brücke vom USB zum 5V Anschluß gelegt werden, weil ja keine Regler angeschlossen sind.
Eine wichtige Erkenntnis: Wenn der Nunchuk aktivert werden soll, muß auch in diesem Fall eine Kalibrierung der Sensoren erfolgen. D.h. dass künftig die Sensoren einmal in Normalbetrieb und einmal im Schwebemodus kalibriert werden müssen.

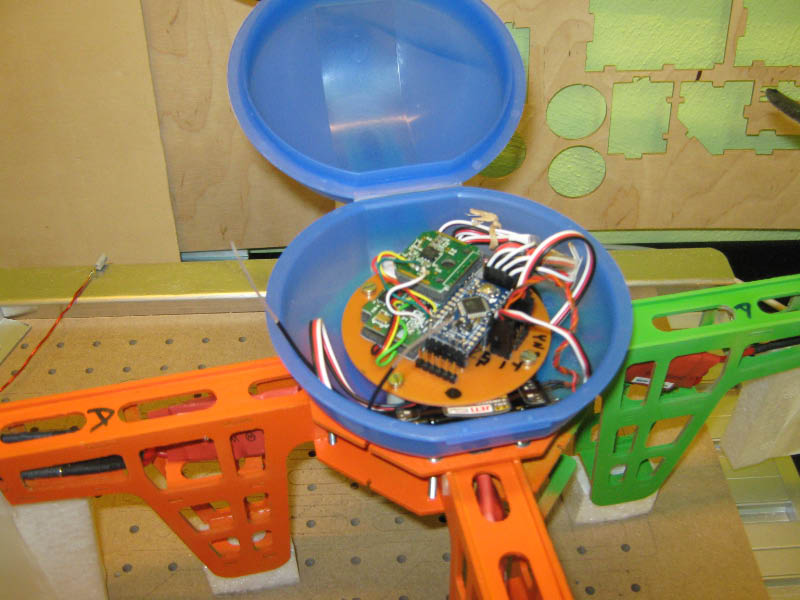


Uns so schaut das ganze jetzt mit Apfelbox-Haube aus. Mehr dann nach der nächsten Flugerprobung.
Anmerkung am Rande: Wer irgendwelche Fehler oder sonstige Anmerkungen zu diesem MultiWii-Copter machen möchte, kann dies über die Kommentarfunktion gerne machen.
8.1.2011 Flugerprobung mit Nunchuk
Heute leider wieder nur Regen und daher nur eine Flugerprobung in der Garage. Der Nunchuck nach dem Aktivieren ist deutlich spürbar und macht das Modell vor allem für Piloten mit wenig Heli-Erfahrung deutlich leichter steuerbar.


Aus sicherheitsgründen wurde aussen ein paar EPP-Klötze provisorisch befestigt, damit bei Kolisionen mit Hindernissen in der Garage das Modell sich nicht so schnell auf den Kopf drehen kann.


Über einen Schalter auf Kanal 5 kann der Nunchuk aktiviert bzw. deaktiviert werden. Wird er aktiviert, wird auf Roll deutlich weniger Steuerung benötigt. Für erfahrende Helipiloten ist das vielleicht nicht so toll, für mich als Flächenpilot ist es aber sehr hilfreich.
Ich fliege jetzt das Modell nur mit 2S / 2100 Lipo und muß sagen dass das für meine Bedürfnisse erst einmal voll und ganz ausreicht. Später mit mehr Erfahrung werde ich evtl. auch zu 3S wechseln, aber im Moment reichen mir die nicht ganz so rasanten Flugleistungen mit dem kleineren Akku völlig aus.
In wesentlichen ist damit der Bau des Murkelcopters mit MultiWii-Steuerung zunächst einmal abgeschlossen. Geplant ist auf jeden Fall noch der Einbau einer Akku-Überwachung und dann natürlich mal richtiges, längeres Fliegen im Freien. Hoffen wir mal auf besseres Wetter in den kommenden Wochen.
Der Winterurlaub geht zudem heute zu Ende, daher wird es jetzt langsamer vorangehen. Es ist auf jeden Fall ein sehr interessantes und spannendes Projekt und ich kann den Bau eines solchen Gerätes nur empfehlen.
10.1.2011 Neue Platinenfräsaktion geplant
Ab sofort sind wieder Arduino Min Pro Baords bei der Fa. Watterott lieferbar. Daher sind einige weitere Murkelcopter- und MultiWii-Copter Mitbauer zu uns gestoßen. Wir planen daher für unsere Mitbauer am kommenden Wochenende (15./16.Januar) nochmal eine Platinenfräsaktion für das WiiCopter-Board (Runde Platine im Warthox-Design). Wir können aber nur eine begrenzte Zahl von Platinen für andere mitfräsen. Wer zuerst kommt, malt also zuerst!


Update 2012: Leider können wir aus zeitlichen Gründen keine Platinen mehr für andere Modellbauer fräsen.
13.1.2011 Zum Thema Controllerplatine und Stromversorgung
Wegen der vielen Fragen nochmal folgede Informationen:
Nackte Platine
Wenn man die Platine fertig bestückt und den Controller mit Software bespielt hat, empfiehlt es sich, die Platine zu testen. Dazu diese einfach mit dem FTDI-Kabel zum PC verbinden und die MultiWii-Config-Software starten. Stromversorgung der Platine erfolgt vom PC.
Nackte Platine mit Empfänger
Wenn an der nackten Platine ein Empfänger angeschlossen ist, so wird dieser nicht vom PC mit Strom versorgt. Grund ist darin, dass der Empfänger im Normalfall seinen Strom aus dem BEC eines Reglers bekommt. Will man hier trotzdem testen, dann einfach mit einem Laborkabel mit Klemme eine Verbindung vom VCC Pin der FTDI-Platine zu einem der +5V-Pins der Reglersteckplätze führen. Dann wird auch der Empfänger mit Strom aus dem PC versorgt.
Voll verkabelte Platine
Ist die Platine im Copter verbaut und voll verkabelt, so ist es NICHT nötig den Antriebsakku anzuschließen, wenn man z.B. Einstellungen am Copter über das Konfigurationsprogramm machen möchte. Es reicht, das FTDI-Kabel anzuschließen. Dieses Versorgt die Platine und die Sensoren.
ACHTUNG: Wenn man einen voll verkabelten MultiWii Copter mit dem angeschlossenem Akku mit dem FTDI Kabel verbindet, kann es vorkommen, dass ein Reset des Arduino Boards ausgelöst wird. Dabei können die Motoren kurz anlaufen! Deshalb beim Anschluß des PC an den Copter immer den Akku abklemmen!
Anschluß der MultiWii Konfigurationsbox
Wenn die MutiWii Konfigurationsbox angeschlossen wird, so wird diese im Normalfall aus der Copter-Platine mit Strom versorgt. Deshalb MUSS in diesem Fall der Akku des Copters angeschlossen sein. Die Regler versorgen den Empfänger mit Strom und man kann alle relevanen Parameter anschauen und bearbeiten.
Alternativ kann man auch die Konfigurationsbox mit Strom versorgen und über diese dann die Copterplatine. Der Antriebsakku bleibt dann abgeklemmt. Allerdings bekommt in diesem Fall der Empfänger keine Spannung und ist daher funktionslos.
14.1.2011 Welcher Empfänger für eine MultiWii-Copter?
Im Rahmen der Platinenfräsaktion kam wieder die Frage nach geeigneten Empfängern für die MultiWii-Platine auf. Hier ist zu sagen, dass grundsätzlich jeder „normale“ RC-Empfänger mit 4 Kanälen geeignet ist. Dabei ist es egal, ob 35MHz, 40MHz oder 2,4GHz. Ein spezieller Empfänger mit „Summensignal“ wie dies bei vielen anderen (kommerziellen) Quadrocoptern nötig ist, wird bei der MultiWii Elektronik NICHT benötigt! Die einzelnen Kanäle werden ganz normal mit der Platine verbunden, wobei es genügt, von Kanal1 alle Anschlüsse vom Empfänger zur Platine zu führen, von den restlichen 3 Kanälen dann einfach nur noch die Impulsanschlüsse. So kommt man mit 2 Servoverlängerungen (insgesamt also 6 Leitungen) aus.
Wer übrigens die Empfängeranschlüße auf der Platine mit Steckbuchsen statt Steckerleisten versieht, kann seinen Empfänger – passende Lage der Anschlüsse vorausgesetzt – einfach direkt auf die Platine aufstecken. Passendes Bild reichen wir bei Gelegenheit nach.
15.1.2011 Erstes längeres Fliegen im Freien
Heute konnte der Murkelcopter zum ersten Male ausgiebig im Freien geflogen werden. Dabei konnte festgestellt werden, dass bei aktiviertem Nunchuk der Copter deutlich weniger wendig ist. Für Kameraflüge etc. ist das ganz nett, auch für Fluganfänger mit einem Quadrocopter ist er sicher hilfreich, aber alle Piloten die Heli-Erfahung haben, können eigentlich getrost darauf verzichten.
Der Nunchuk ist also ganz klar als „Sonderzubehör“ zu betrachten.






16.1.2011 Fliegen bei Sonnenschein
Heute war fliegen vom Nachmittag bis zur Dunkelheit angesagt. Dabei wurde mit 2S und 3S geflogen. Im Freien sind doch 3S deutlich besser als 2S weil der Murkelcopter agiler wird und auch mehr Reserven hat. Im Vergleich zum GAUI 330 XS ist der Murkelcopter um einiges leistungsfähiger, er hat allerdings auch stärkere Motoren!




Durch den Blitz des Fotoapparates ist der Copter auf dem Foto gut zu sehen, der Realität war es eher bescheiden. Da müssen also bei passender Gelegenheit ein paar LED’s dran.
18.1.2011 Verbaute Komponenten des Murkelcopters
Auf vielfachen Wunsch hier die Auflistung der im Murkelcopter verbauten Komponenten.
- Motoren: KDA20-28M (Hobbyking) Motor mit 1050Kv
- Luftschrauben: GAUI 8Zoll Set (Mamo-Modell)
- Regler: TURNIGY Plush 18A (Hobbyking)
- Akku: Kokam 2s2100 oder 3s2100 (Hoellein)
- WiiMotion Plus: Original Nintendo (war bei Amazon auch nur 3 EUR teurer als eine Kopie)
- Nunchuk: Original Nintendo (auch von Amazon)
- Controller: Arduino Mini Pro 5V/16MHz (Watterott)
- Empfänger: JETI 5 Kanal (Hoellein)
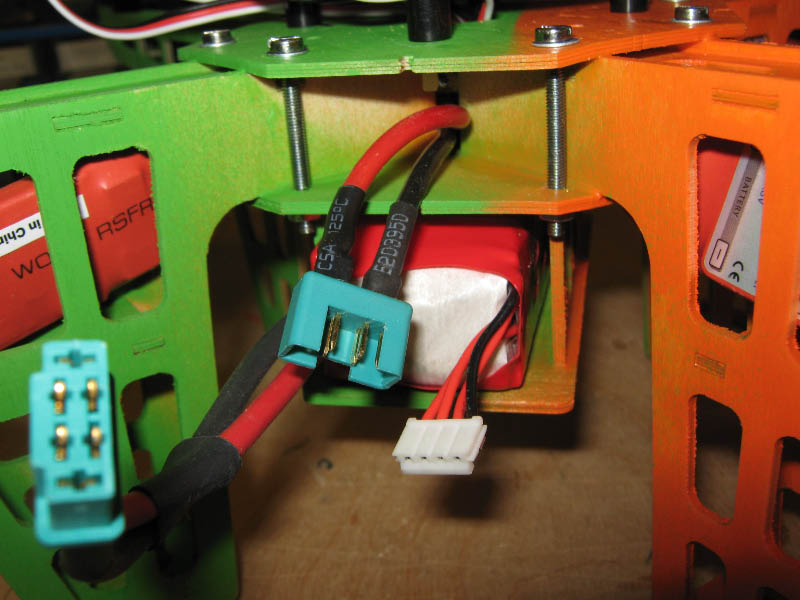
Die Verkabelung der Regler zum Akku ist mit 2,5qm Kabel gemacht, weil da im Worst-Case auch knapp 40A fließen können (pro Motor ca. 10 A bei 3S). Mein Stecker ist ein grüner Multiplex-Stecker, der mit dieser Strombelastung zugegebenermaßen am Limit ist.


19.1.2011 Nachtrag zur Platinenfräsaktion
Wir haben erheblich mehr Bestellungen/Überweisungen bekommen als zunächst bei der ersten Umfrage genannt wurden. Daher reicht die Anzahl der am letzten Wochenende gefrästen Platinen nicht aus, um allen Interessenten sofort eine Platine zu senden. Es wird eine letzte Fräsaktion geben sobald die neue Lieferung von Basismaterial eingetroffen ist. Einen genauen Termin können wir nicht nennen, aber es soll möglichst bald sein. Wir werden allen Bestellern und Interessenten eine Mail senden, sobald wir genaueres sagen können.
22.1.2011 Erster Nachbau in der Luft
Heute kam der erste – mir bekannte – Nachbau des Murkelcopters in die Luft. Rayko absolvierte erfolgreich seinen Erstflug. Hier ein Bild:


Ich bekomme eine Menge Fragen und die Antworten pflege ich soweit möglich, im Text an einer passenden Stelle ein. Daher sind noch eine Menge Details ergänzt worden. Ich bitte also die Leser, auch mal den ganzen Artikel in seinen älteren Abschnitten hin und wieder mal zu überfliegen.
23.1.2011 Vorläufiger Abschluß der Platinenfräsaktion
Da wir auch noch was anderes machen wollen als nur Platinen zu fräsen, haben wir heute bis weiteres auf die letzten Platinen gefräst. Die bekannten Interessenten wurden per Email informiert. Da die noch vorhandenen Platinen praktisch weg sind, ist jetzt erst mal Schluß.
Falls wir wieder mal Platinen haben, werden wir es hier kund tun.
29.1.2011 Update der Platinen DXF-Daten
Da einige Leute Probleme mit dem Import der DXF-Daten der Platine in Ihre CAM-Software hatten, gibt es einen Update des ZIP-File der Platinendaten. Hier ist jetzt zum einen die Datei als DXF aber auch als PLT enthalten, zudem ist jetzt auch die kleine Adapterplatine für die Regler mit dabei. Der Download erfolgt weiterhin über den Knopf weiter oben im Text.
30.1.2011 Fräsaktion Murkelcopter-Rahmen geplant
Auf vielfachen Wunsch haben wir eine Fräsaktion mit den aktuellen Daten des Murkelcopter-Rahmens geplant. Wir werden hier nochmal einige Rahmen aus 2mm Birkenflugzeugsperrholz fräsen.


Zuerst werden die Löcher für die Halteschrauben gebohrt, dann die Platte aufgeschraubt und anschließend alles durchgefräst. Zum Schluß liegt eine Platte mit allen Teilen vor. Die Teile können dann mit einem scharfen Messer herausgetrennt und verputzt werden.
Update 2012: Aus zeitlichen Gründen können wir leider keine Rahmen mehr für andere Modellbauer fräsen. Wer einen braucht, sollte sich mit den Fräsdaten an einen Bekannten wenden, der eine CNC Fräse hat.
21.4.2011 Diverse Korrekturen und Ergänzungen
Es wurde der Fehler in der Platinenbeschriftung behoben und diverse Ergänzungen an den Beschreibungen vorgenommen.
Wichtiger Hinweis für die Verbindung Motor-Regler: Wir mussten leider feststellen, dass die bei den Hongkong-Motoren mitgelieferten 3,5mm Goldstecker teilweise erhebliche Toleranzen aufweisen und nicht wirklich fest stecken. Folge ist ein Wackelkontakt der zu stotternden Motoren und damit auch zu unkontrollierbarem Flugverhalten führt. Also im Zweifelsfalle unbedingt die Verbindungen zwischen Motor und Regler prüfen.
27.4.2011 Weitere Ergänzungen
Bitte die zusätzlichen Hinweise zur Konfiguration der Regler und deren Anschluß beachten.
22.5.2011 Murkelcopter-Rahmen Materialauswahl
Hier einige Informationen zu „alternativen“ Materialien für den Murkelcopter-Rahmen. Das originale Design ist für 2mm Flugzeugsperrholz entwickelt und ist bei Verwendung eines hochwertigen 2mm Birkensperrholz sehr robust – wenn man die Faserrichtung der Frästeile richtig wählt. Die Teile im Plan sind so positioniert, dass beim Faserverlauf in Längsrichtung die Teile hinterher einen sehr belastbaren Rahmen abgeben. Wenn man diesen aus 10m Höhe durchsacken lässt, dann ist er natürlich hin, aber sonst verträgt er sehr viel.
Einige Leute haben nun Rahmen aus 3mm Sperrholz gebaut. Nun ja, das kann man machen, aber das Modell wird sehr schwer wenn man ein hochwertiges Birkensperrholz benutzt (Von Buchensperrholz raten wir ab, das ist zu spröde). 3mm Pappelsperrholz geht gar nicht, ist definitiv zu weich und in der Regel auch nur 3lagig.
Dann hat uns Werner Stratmann noch eine schöne 3D Animation des Murkelcoper Rahmens gesendet. Das ganze ist ein PDF, welches man herunterladen muß und in dem man dann durch Anklicken den Rahmen frei drehen kann.

Wer den Murkelcopter-Rahmen aus GfK fräsen will, dem empfehlen wir die Verwendung von 1mm Material. Stabilitätsmäßig reicht das völlig und auch das Gewicht bleibt so akzeptabel. Auch für CfK reicht 1mm Material völlig. Allerdings muß in diesem Fall die DXF Daten so abgeändert werden, dass alle Aussparungen für die Steckungen von 2mm auf 1mm reduziert werden. Dabei 0,2mm Übermaß nicht vergessen, sonst lassen sich die Teile hinterher nicht zusammenstecken.
28.1.2012 Informationen zur MultiWii-Software
Der Murkelcopter in der Ur-Version flog mit der Version 1.5 stable der MultiWii Software. Diese Software wurde in den letzten 12 Monaten erheblich weiterentwickelt. Aktuell ist die Version 2.1. Ein Update unseres Murkelcopters ist geplant. Sobald die neue Software im Einsatz ist, werden wir berichten.
Nachtrag: Die MultiWii Software Version 1.9 kann nur mit dem Arduino SDK Version 0.23 oder 0.22 kompiliert werden. Das neue Arduino 1.0 SDK hat geänderte Serielle Routinen und es kommt daher zu einer Fehlermeldung. Ab MultiWii Version 2.0 ist auf das Arduino 1.0 SDK Dateiformat umgestellt.
Die Linksammlung
Mittlerweile (Stand Dezember 2012) gibt es eine Unmenge Artikel und Informationen zum Thema MultiWii auch in deutscher Sprache. Einfach mal nach „MultiWii“ oder „WiiCopter“ googeln. Hier ein paar gute Links zum Einsteigen:
http://www.multiwii.com/ Die offizielle Seite vom MultiWii Autor – hier gibt es auch die neueste Software zum Download
http://www.microcopters.de/artikel/das-multiwiicopter-howto Ein deutschsprachiger Artikel der auch auf die verschiedenen Sensoren am MultiWIi eingeht
http://www.rcgroups.com/forums/showthread.php?t=1340771 Das amrikanische Forum in dem die MultiWii-Sache ihren Anfang nahm..
Was soll ich da schreiben?
Ich bin einfach nur platt. Eine geniale Arbeit.
Gruß Ricc
Hallo!
Wie groß ist denn der Durchmesser der Platine? Ich würde sie gerne selber ätzen, da ich keine Fräse besitze. Und um die Schaltung passend auszudrucken benötige ich den Durchmesser, damit am Ende alle Löcher den richtigen Abstand haben.
Gruß Nico
Der Durchmesser der Platine ist 72mm. Ich denke es ist aber besser, die Abstädne der Befestigungsbohrungen zur Grundlage zu nehmen. Der Abstand der Bohrungen beträgt 45mm von mitte zu Mitte. Alle Bohrungen sind im Raster 2,54mm
Hallo wie groß muss die sperrholz platte sein zum fräsen
Gruß Peter
Wir haben da immer Birkensperrholz 2mm in den Abmessungen 30*100cm aus dem Holzhandel. Da passt der Copter drauf und es bleibt hinten noch ein bischen was übrig.
Tach,
für welche Fräsergröße ist die DXF denn ausgelegt worden? Wenn man mit nem 2er fräst bleiben ja doch deutliche Radien an den Innenecken stehen, passt das dann noch zusammen?
Mit was für einem Durchmesser wurde denn gefräst?
Vielen Dank fürs Veröffentlichen und viele Grüße,
Marc
Hallo Marc, ich habe da mit einem 1,2 mm Spiralfräser gefräst. Der ist deutlich stabiler als ein 1mm Fräser und die Radien sind mit 0,6mm ausreichend eckig