
Anhaltend saumäßiges, stürmisches Wetter hat uns bewogen, einen kleinen Indoor-Copter zu bauen – den ClausiCopter.

Das Ziel war ein einfach aufzubauender Rahmen mit einer hohen Crash-Resistenz, denn Indoor kracht man schon mal auf den harten Fußboden. Also mal kurz geschaut was die Bastelkiste so hergibt und dann losgebaut. Ein paar fehlende Teile konnten schnell bestellt und geliefert werden…
Wir hatten schon länger mit dem Bau eines Indoor-Copters geliebäugelt, aber es fehlte die Zeit und auch die Motivation. Jetzt mußte aber so ein Ding her. Eigentlich für einen Acro-tauglichen Powercopter geplant hatten wir vor kurzem ein NANOWII-Board von Flyduino bestellt und das wurde nun als Ausgangspunkt der Konstruktion des ClausiCopter gewählt.
Als Material dachten wir beim Rahmen zuerst wieder an eine ALU-GFK-Konstruktion, aber es war schnell klar, dass das viel zu schwer wird. In der Restekiste hatten wir aber noch einige Stücke 1mm CFK und so wurde mit einer Konstruktion ähnlich dem bekannten RACHEL-Rahmen von microcopters.de begonnen, nur eben viel kleiner. (Nahezu zeitgleich hat dann der Tilmann übrigens seinen kleinen LEORA-Rahmen präsentiert). Wir waren gespannt, ob diese Bauweise aus flachem CFK-Plattenmaterial wirklich so stabil ist wie immer wieder behauptet wird. Hier das Ergebnis unserer ersten Konstruktionsrunde:

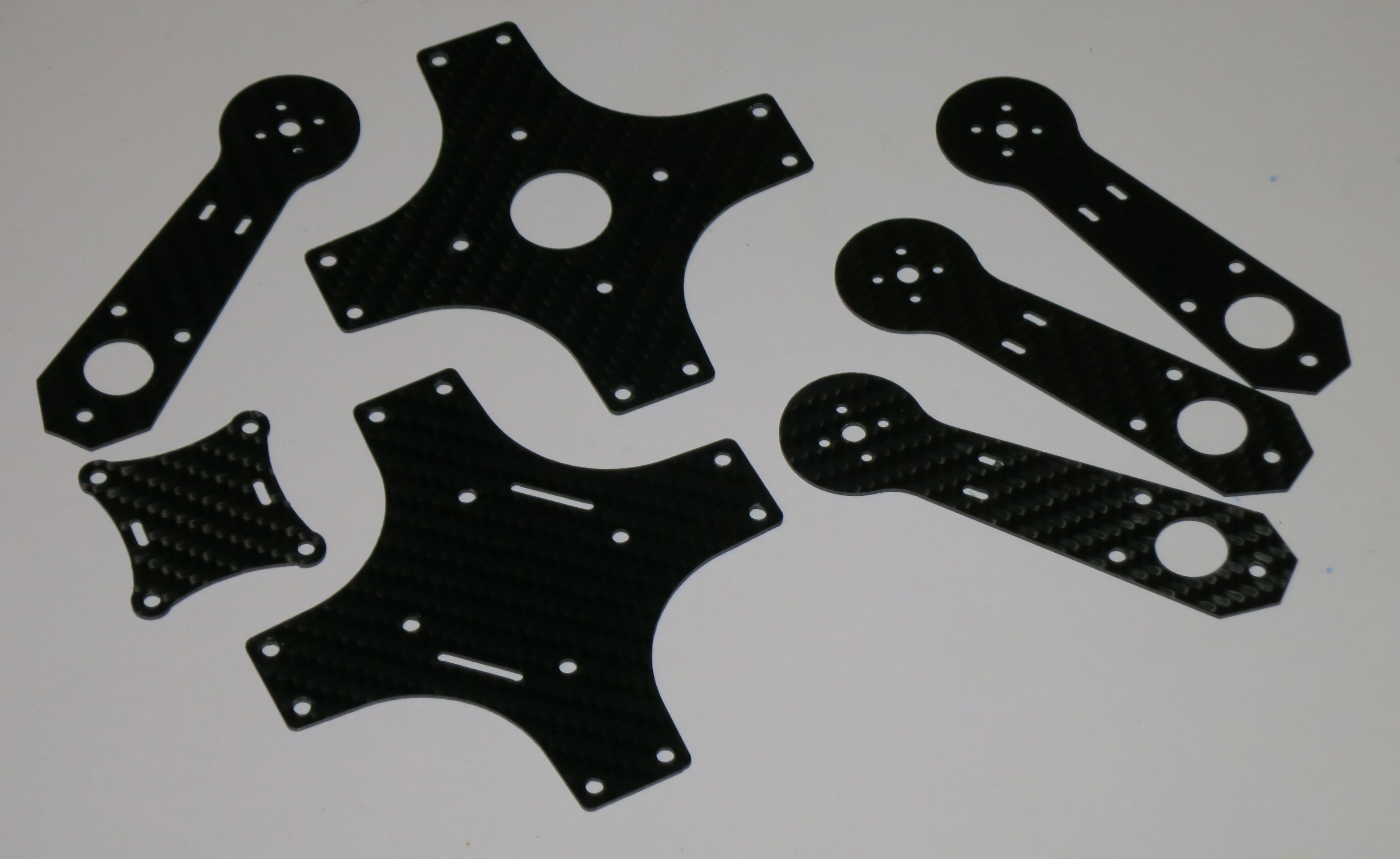
Unsere Vorgabe war aber, mit dem vorhandenen 1mm CFK-Material auszukommen. Daher sind die Maße des ClausiCopters so gewählt, dass wir alles aus unserer Restplatte fräsen konnten. Die Centerplatte ist oben und unten aus 1mm CFK, die Arme wären aber aus 1mm zu labberig. Aber extra 2mm CFK besorgen? Das war uns zu kompliziert.

Als Lösung haben wir die Arme 8-fach ausgefräst und einfach doppelt genommen. Die Arme sind dann 2mm stark und das reicht, wenn es sauber verschraubt wird. (Wir hatten auch einen Versuch mit Armen aus 2mm GFK gemacht, aber die sind höllisch schwer und dennoch nicht so stabil wie die doppelten CFK-Arme).


Der fertige Rahmen kommt dann in CFK auf 41g.


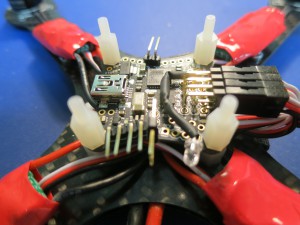
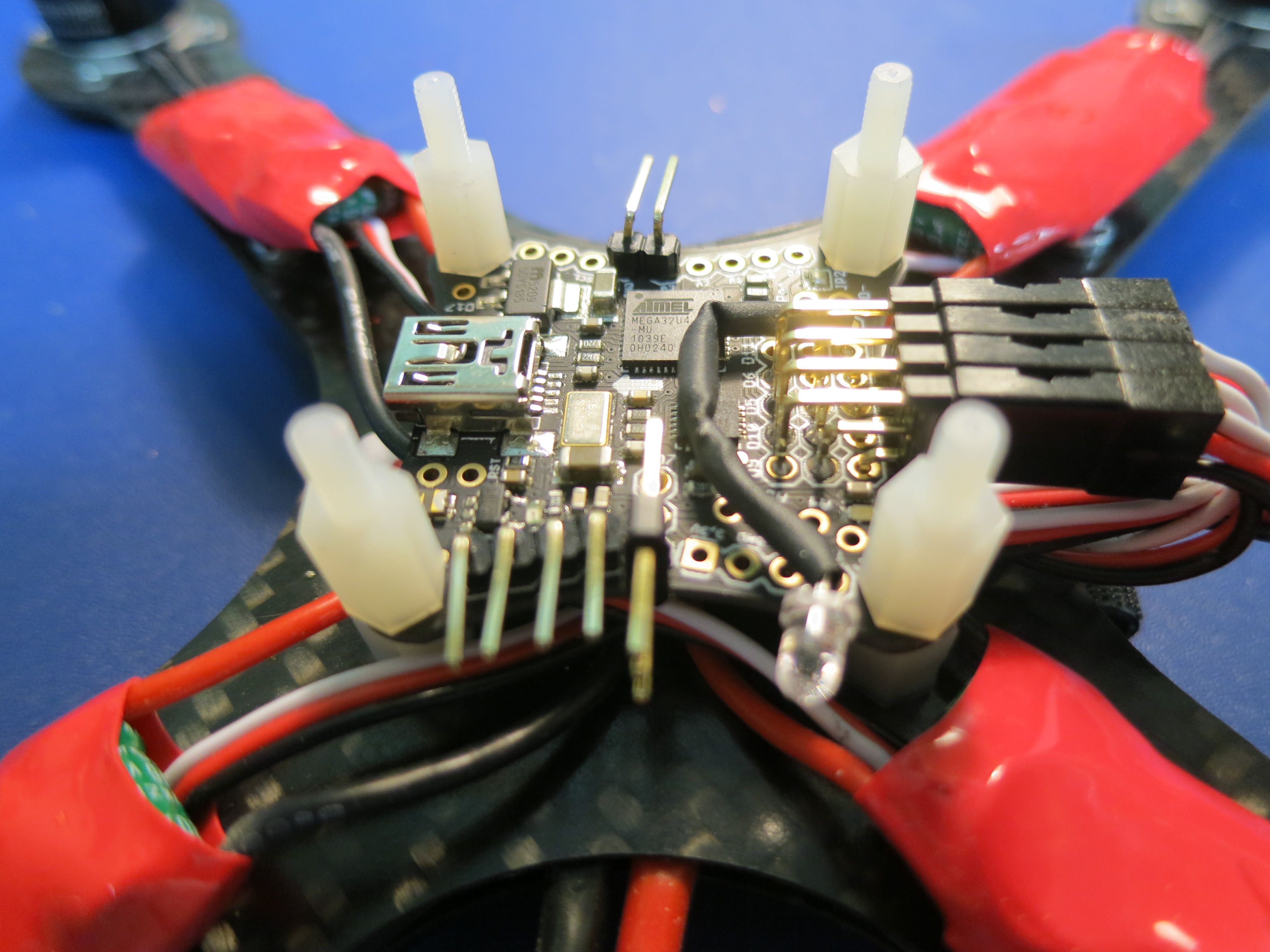
Die Flugsteuerung ist das NANOWII-Board von Flyduino.net. Dieser Controller hat den neuen ATmega32u4 Prozessor, der neben einer USB-Schnittstelle auch 6 echte PWM Ausgänge mit 11bit Auflösung hat. Damit regelt das Board noch besser und feinfühliger als die bisherigen 328er Boards. Die Verarbeitung dieses Boards ist auch eine Klasse für sich – da können HobbyKing & Co nicht ansatzweise mithalten. Hochwertiger Löstopplack, ordentliche Vergoldung, sauber positionierte SMD-Bauteile, maßhaltige Bohrungen. Und mit einem Preis von rund 38 EUR wirklich bezahlbar. Eine sehr gute Dokumentation des Boards gibt es >>HIER<< bei flyguino zum Download.
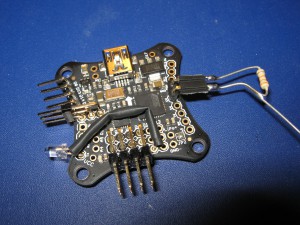
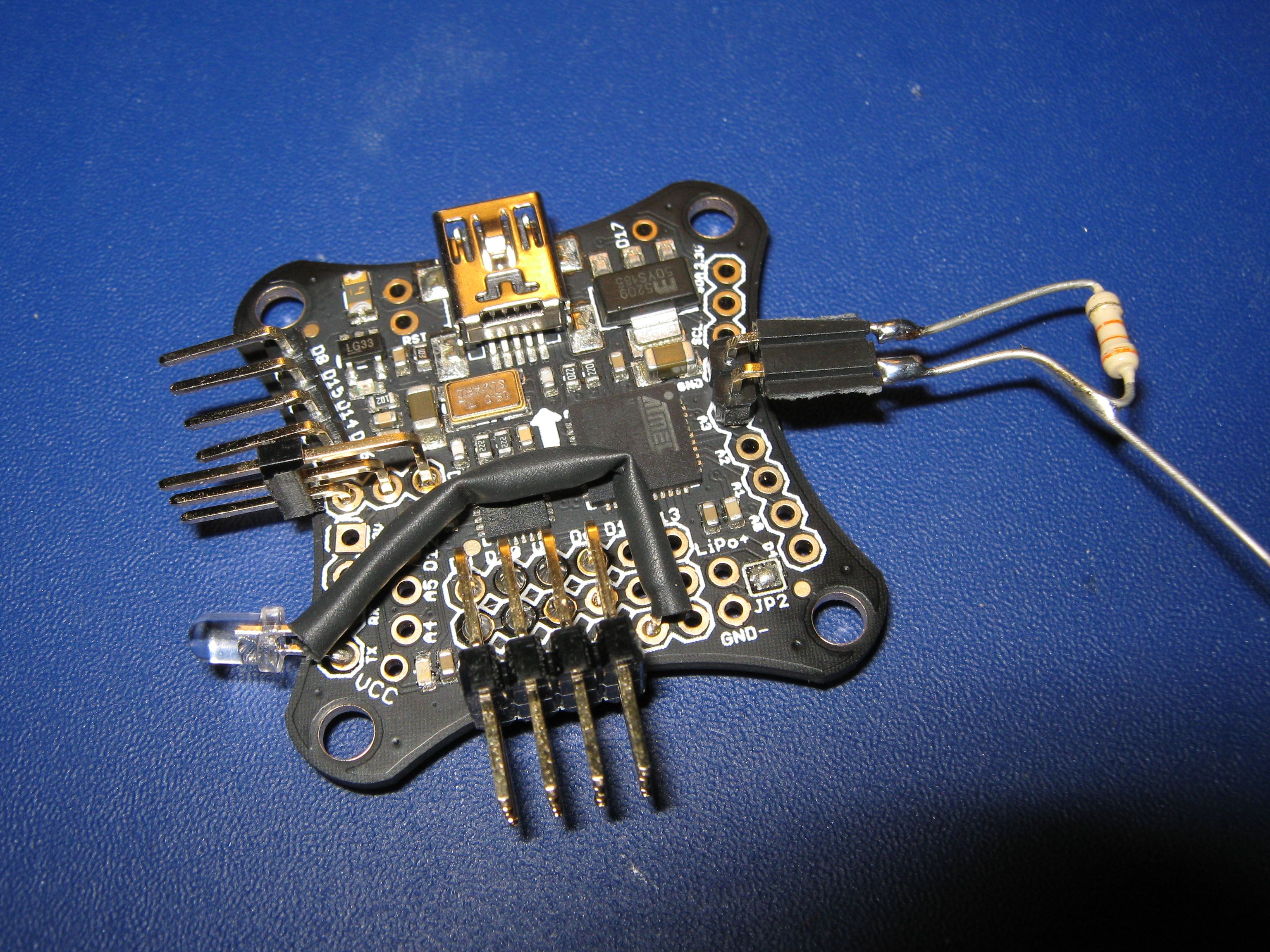
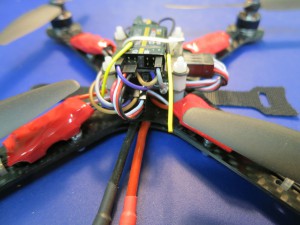
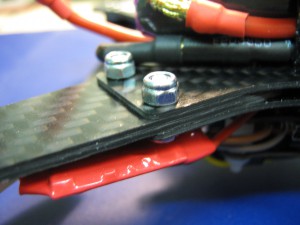
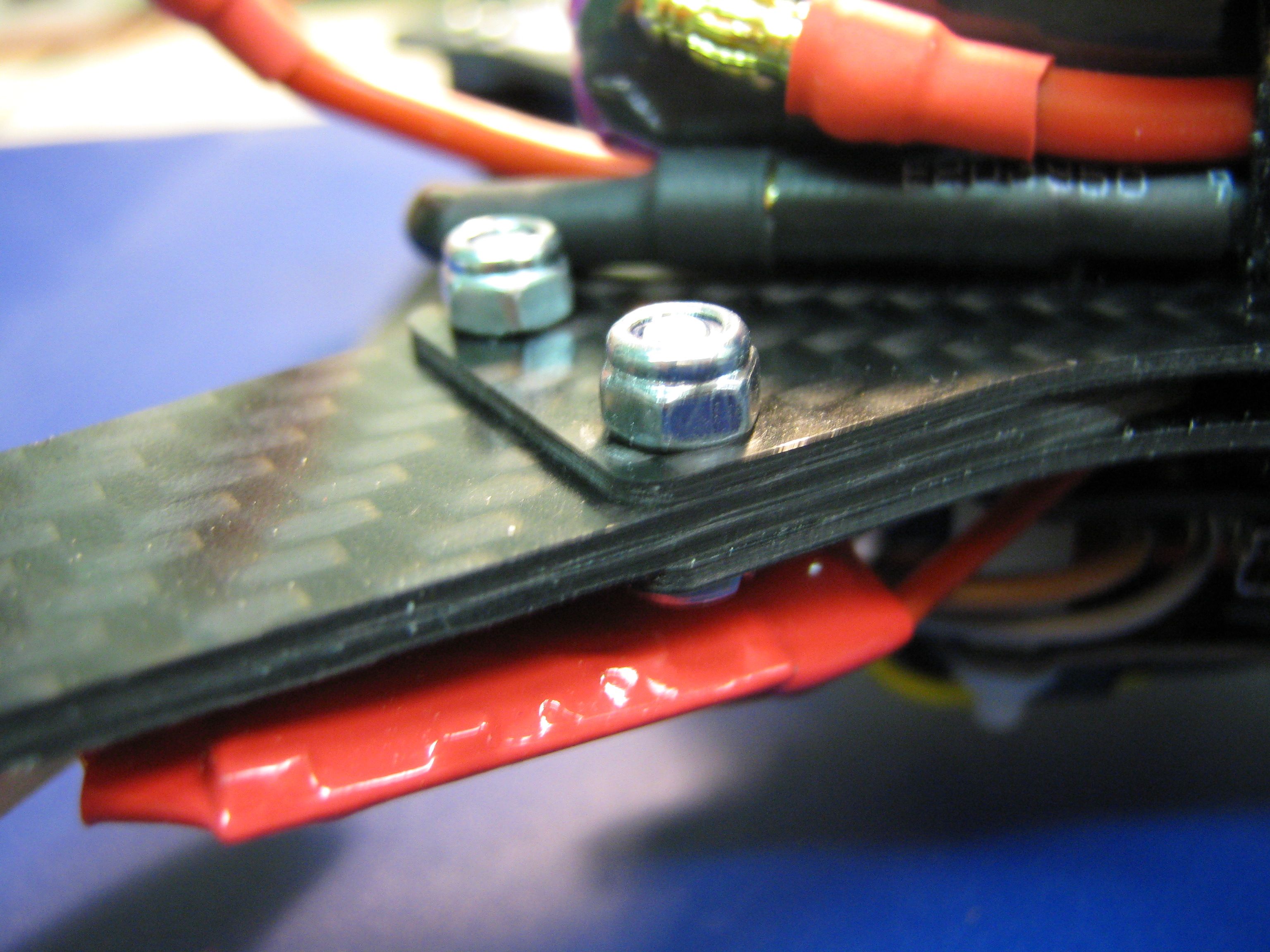
Um die Bauhöhe der Verkabelung gering zu halten, wurden abgewinkelte Steckverbinder eingelötet. So kann eine Abeckplatte montiert werden um die Elektronik zu schützen. Der Aufbau erolgt mit Nylon-Bolzen. Diese sind leichtgewichtig und es besteht keine Gefahr, versehentlich einen Kurzschluß am Controllerboard zu verursachen.
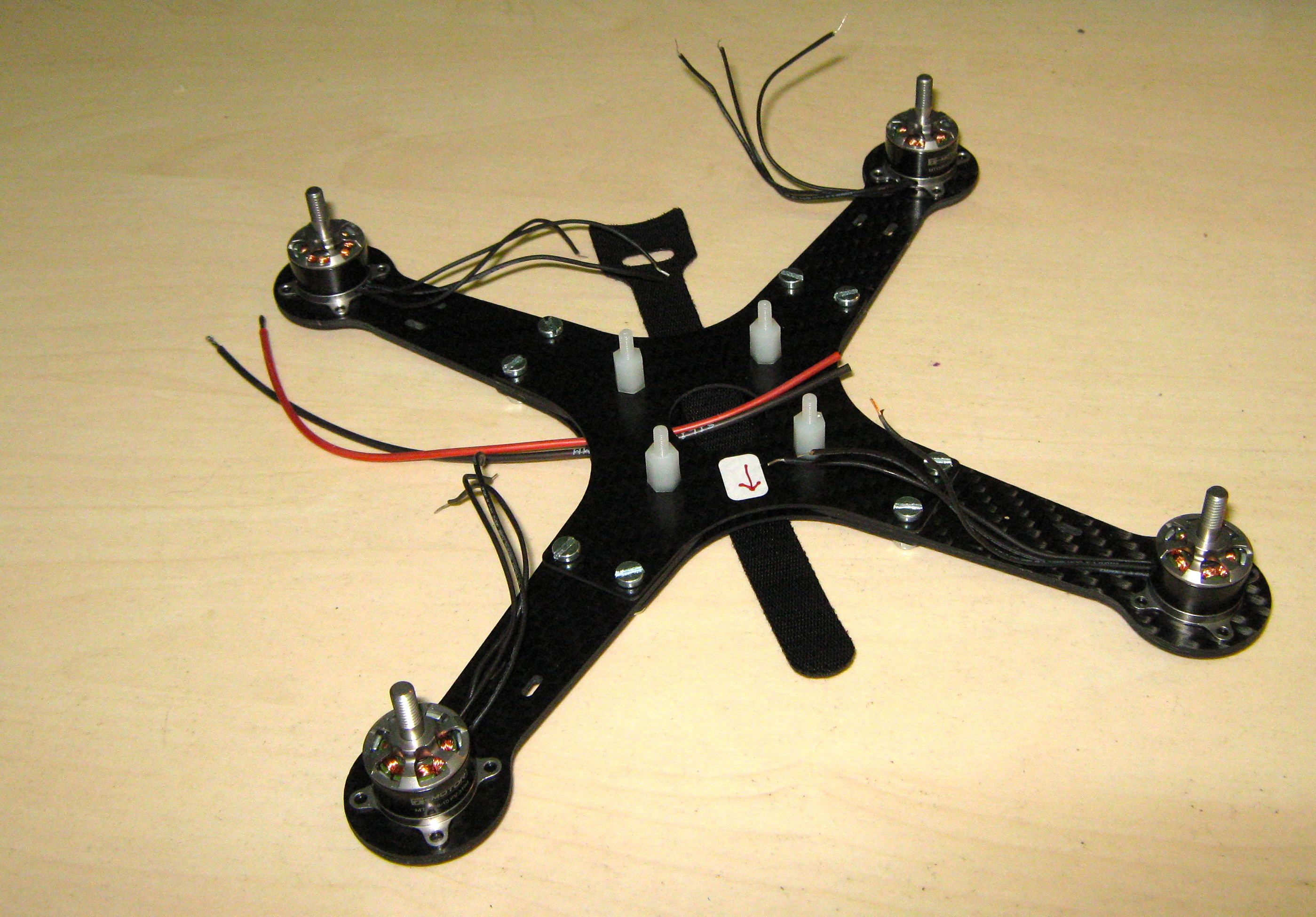
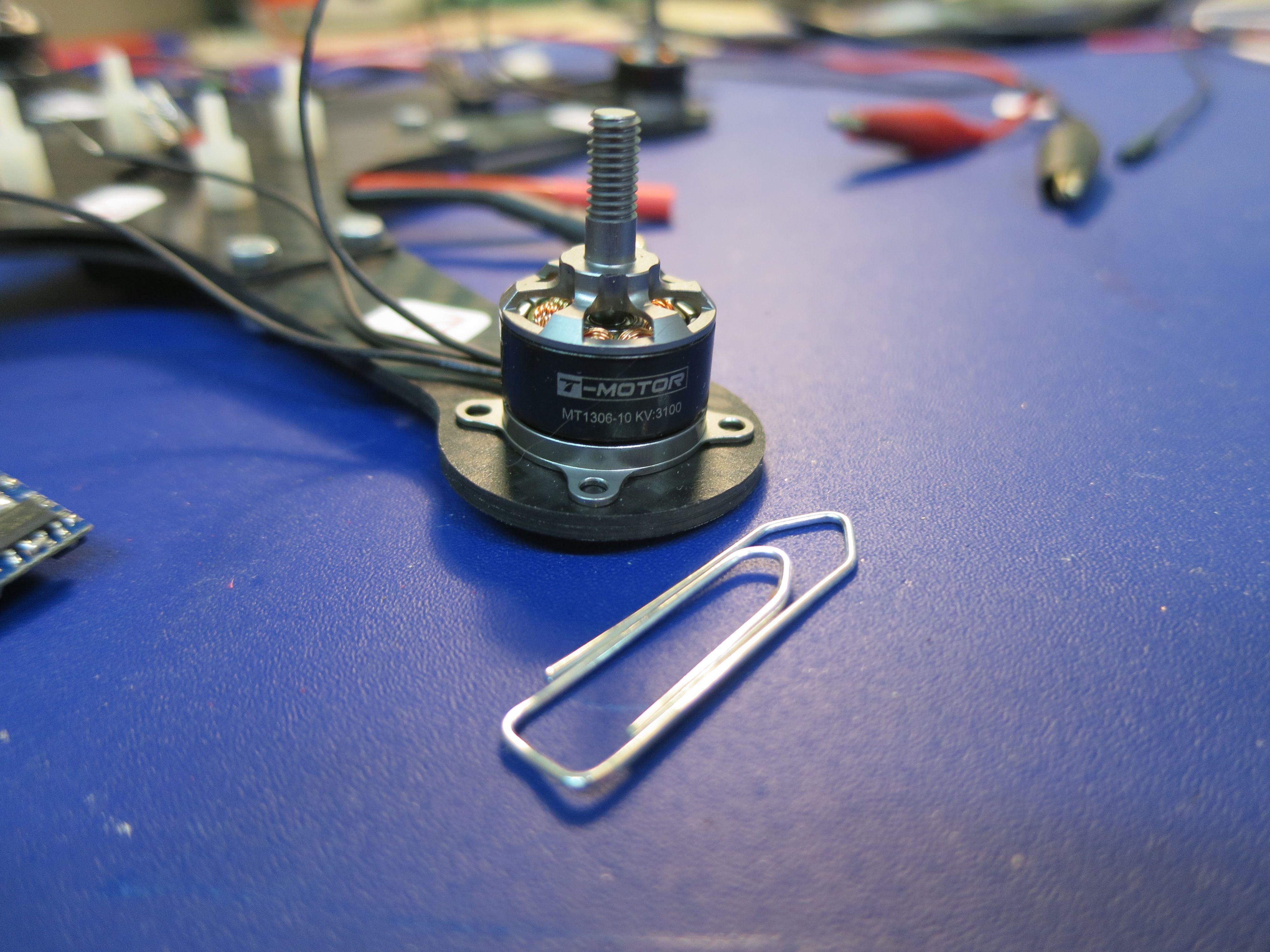
Als Motoren kommen die schnuckligen MT1306-10 von T-MOTORS zum Einsatz. Dies sind überaus hochwertig verarbeitete Außenläufer mit geringem Gewicht und einem sehr guten Rundlauf. Die Montage erfolgt mit 4 M2 Schrauben von der Unterseite der Arme aus. Um die Motoren bei einem seitlichen Anprall zu schützen, ist die Montageplatte ein wenig größer ausgeführt. Es ist dann ein 2mm breiter Rand rund um den Motor, der im Fall der Fälle das Schlimmste abhält.



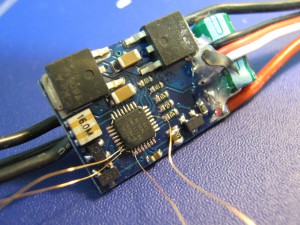
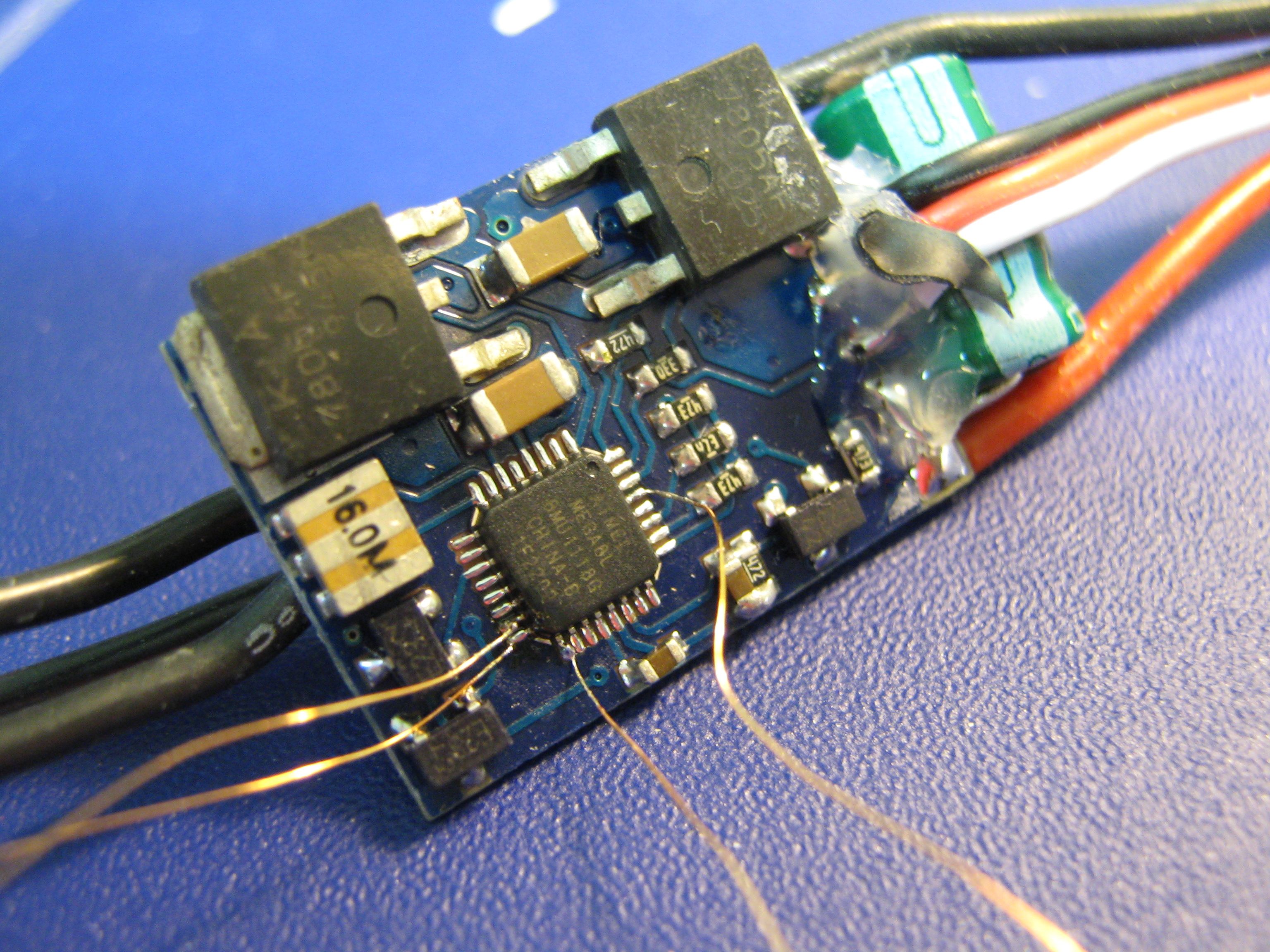
Die Regler sind vier HK SS 10A Regler, die wir zufällig noch aus Slowflyer-Zeiten in der Schublade hatten. Diese wurden mit der neuesten SIMONK-Software geflasht. Leider haben die kleinen Regler einen MEGA8 im klitzekleinen TFQP-Gehäuse, weshalb nicht mit dem Aufsteck-Adapter gearbeitet werden konnte. Stattdessen wurden dünne 0,3mm Kupferlackdrähte (aus einem alten Trafo) angelötet und mit dem USB-Flasher verbunden. So konnte dann wie üblich geflasht werden

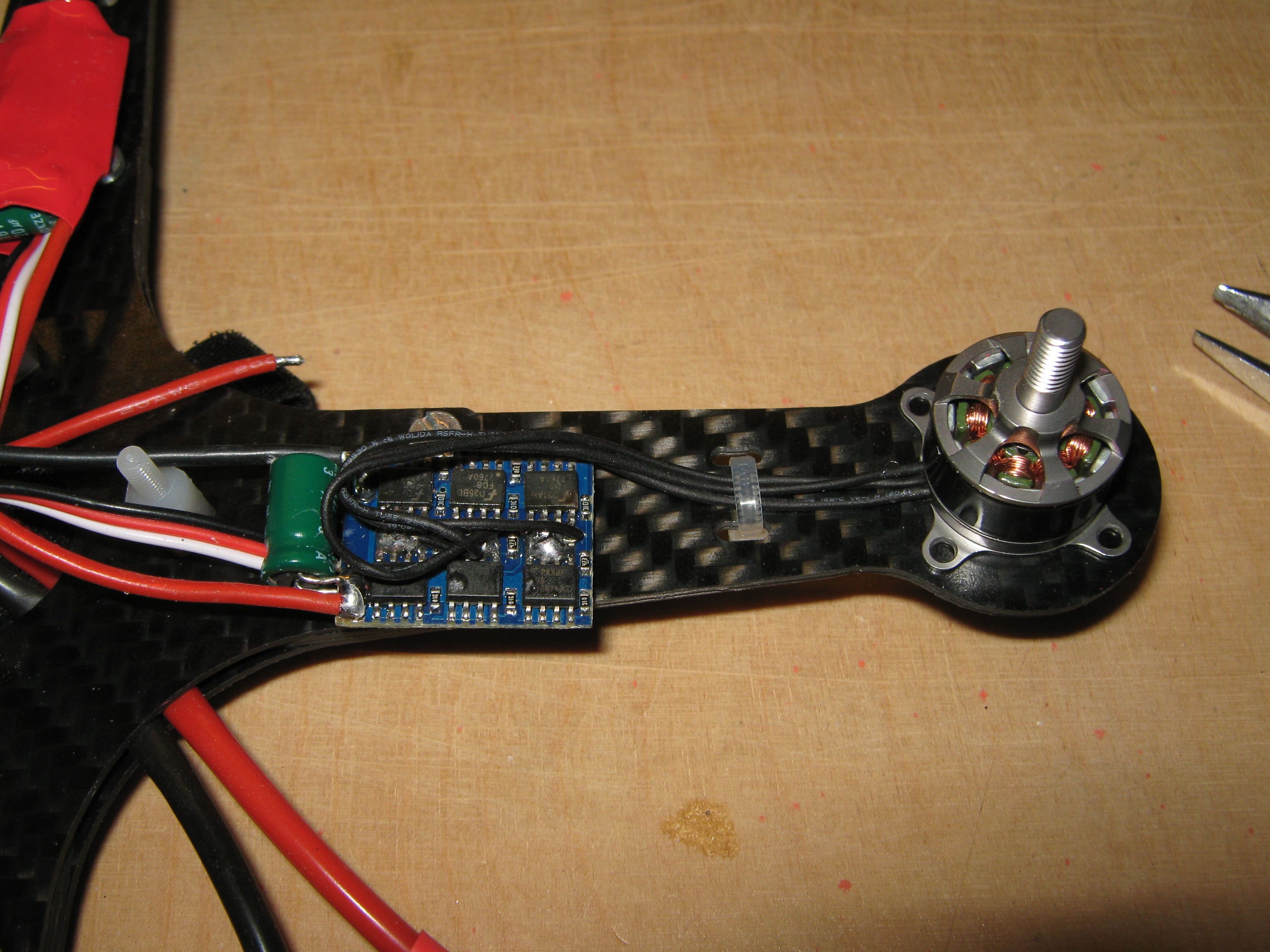
Nach einem Zwischentest wurde dann alle Motorkabel des Reglers abgelötet und die doch recht langen Anschlußleitungen der Motoren direkt angelötet. Leider hatten wir keinen schwarzen Schrumpfschlauch mehr, daher wurde roter verwendet. Nach dem Einschrumpfen wurden alle Leitungen in der Mitte zusammengelötet. Das hätten wir allerdings zuerst machen sollen, denn wegen der schon angelöteten Motorkabel hatten wir nur wenig Spielraum mit den Reglern und so war das ein ziemliches gefummel bis alles einigermaßen sauber gepasst hat.


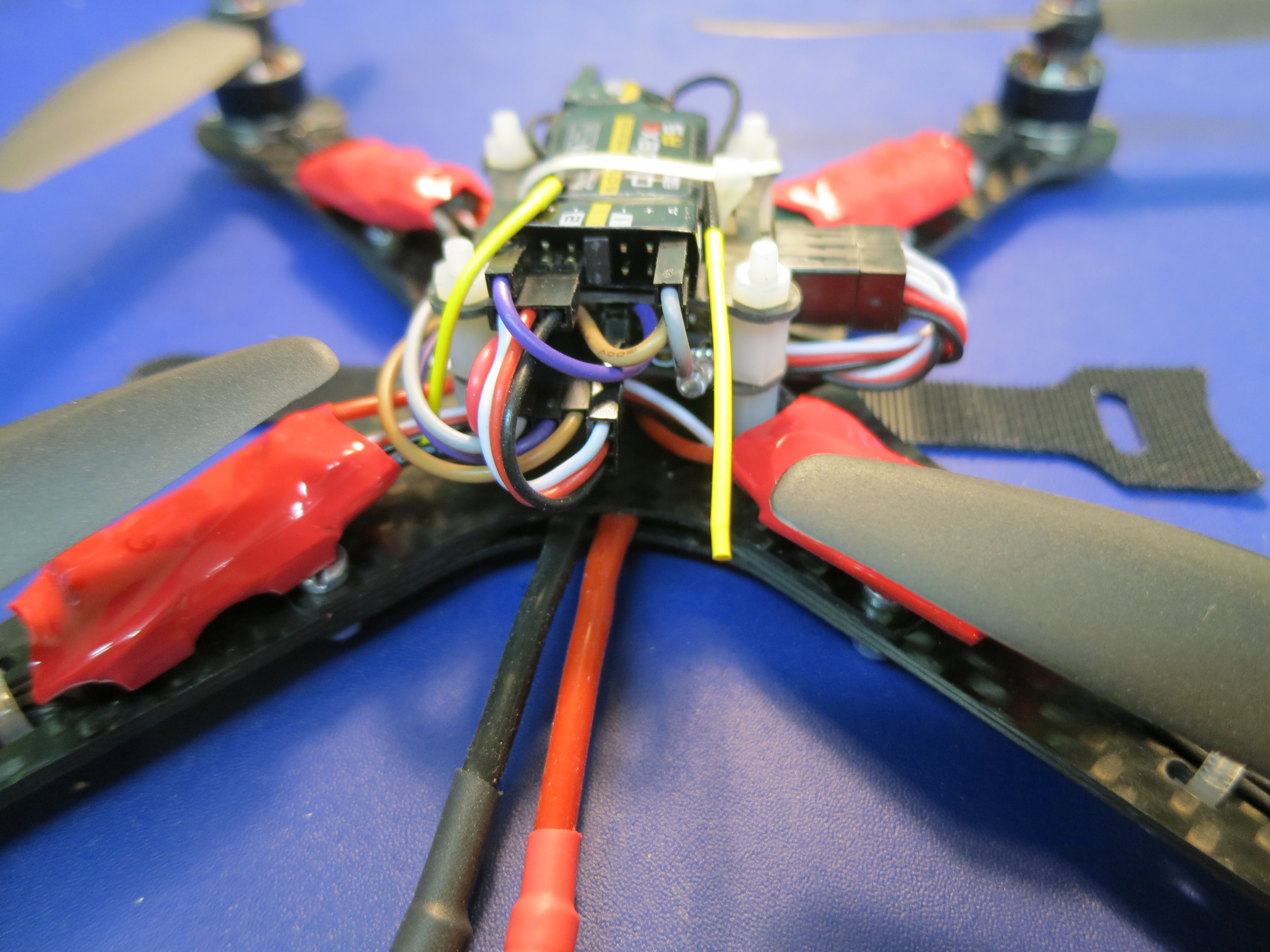
Um die Elektronik zu schützen, wird über dem Board eine kleine CFK-Abdeckplatte montiert, auf der dann der JETI-5Kanal-Empfänger thront. Leider hatten wir keinen Summensignal-Empfänger zur Hand und mußten daher die 5 Kanäle einzeln verkabeln. Das gab dann trotz der 1-Pin Kabel eine ziemliche Menge Draht.
Als Luftschrauben kommen 5*3 Zweiblattschrauben zum Einsatz. Diese sind bei verschiedenen Quellen erhältlich, unsere kamen von flyduino.net und passen perfekt auf die MT-Motoren.


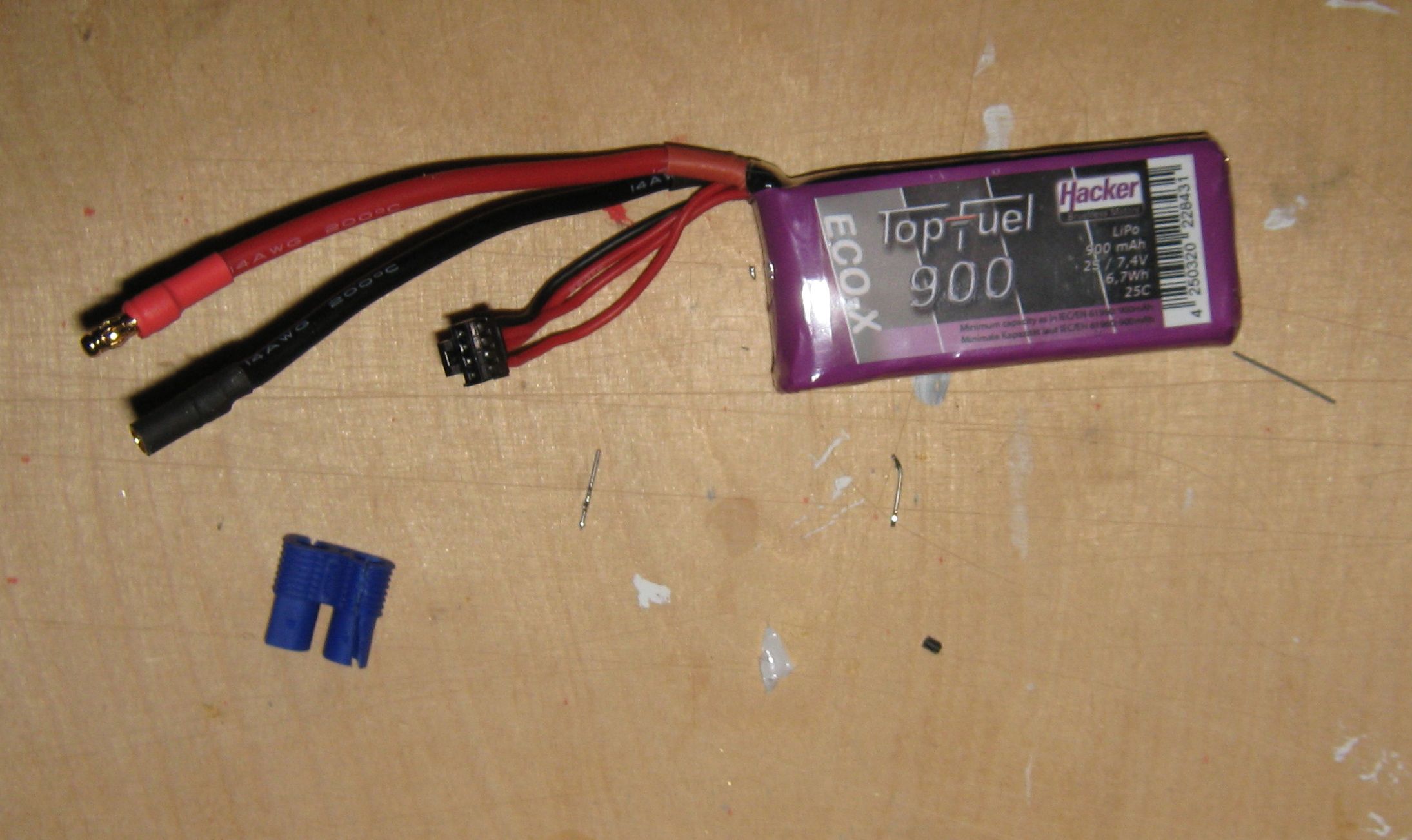
Beim Akku haben wir auf 2s 900mAh aus der ECO-Serie von Hacker zurückgegriffen. Diese haben zwar die dummen Balancerstecker im 2mm Raster, sind aber mit einem Preis von knapp 6 EUR das Stück bei unserem Lieblingshändler Hoellein unschlagbar preiswert zu bekommen. (Freitag bestellt, Samstags geliefert) Die voluminösen blauen Stecker im Plastikgehäuse wurden aber gleich durch einfache 3,5mm Stecker und Buchsen im Schrumpfschlauch ersetzt.

Die Befestigung des Akkus am Rahmen erfolgt mit Klettband und einem Klettgurt aus einem alten Koax-Heli.
Um den Akku des ClausiCopters im Eifer des Gefechts nicht gnadenlos leerzufliegen, ist am NANOWII-Board an A3 ein Spannungsteiler mit zwei Widerständen (33K an GGND / 56K zum Akku) angesteckt, an den dann wiederum das Balancerkabel des Akku eingesteckt wird. Beim Unterschreiten von 3,4V/Zelle beginnt dann eine gelbe 3mm High-Power-LED zu blinken. Die LED ist vom TX-Anschluß über einen 220Ohm Wiederstand nach GND verbunden.
Flugfertig wiegt der ClausiCopter 223g. Nicht schlecht für den ersten Versuch. Natürlich hat Clausi noch einiges an Einsparpotential. So könnte man z.B. die Schrauben für den Rahmen statt M3 durch welche in M2,5 oder sogar M2 ersetzen, die zentrale Verkabelung der Regler könnte kürzer sein und auch ein kleiner Summensignalempfänger käme mit weniger Kabeln aus. Und dann könnte man bei 3 Reglern die Plus-Leitung noch entfernen. Also sicher noch ein Einsparpotential von wenigstens 15 bis 20 Gramm in Summe.
Aber wir wollten erst mal schnell in Luft – also später vielleicht noch eine Optimierungsrunde.
Für alle Nachbauwilligen eines ClausiCopters stellen wir hier die passenden Downloads zur Verfügung.
Zum Ersten die CAD-Daten im DXF-Format sowie im SKF-Autosketch-Format.
DOWNLOAD Clausicopter.ZIP

Dieses Werk bzw. Inhalt steht unter einer Creative Commons Namensnennung – Nicht-kommerziell – Weitergabe unter gleichen Bedingungen 3.0 Deutschland Lizenz.
Zum Zweiten eine fertig angepasste MultiWii 2.1 Software. Diese ist für das Flyduino NANOWII Board passend und für einen X-Copter mit 2S-Lipo und Akkuüberwachung mit LED konfiguriert.
DOWNLOAD NanoWii2.ZIP
Hallo..
der copter sieht schon geil aus.Respekt! 😉
Würde gerne den copter nachbauen wollen(oder lassen) aber mit längeren Armen.Für 6er Props.
Hast du vielleicht die Cad daten(mit längeren Armen)da?
Gruß+Dank
Bullit007
Leidet nein, aber es sind die dxf daten mit dabei. Kannst Du mit jedem bessern CAD Programm hochskalieren…
ok Danke